


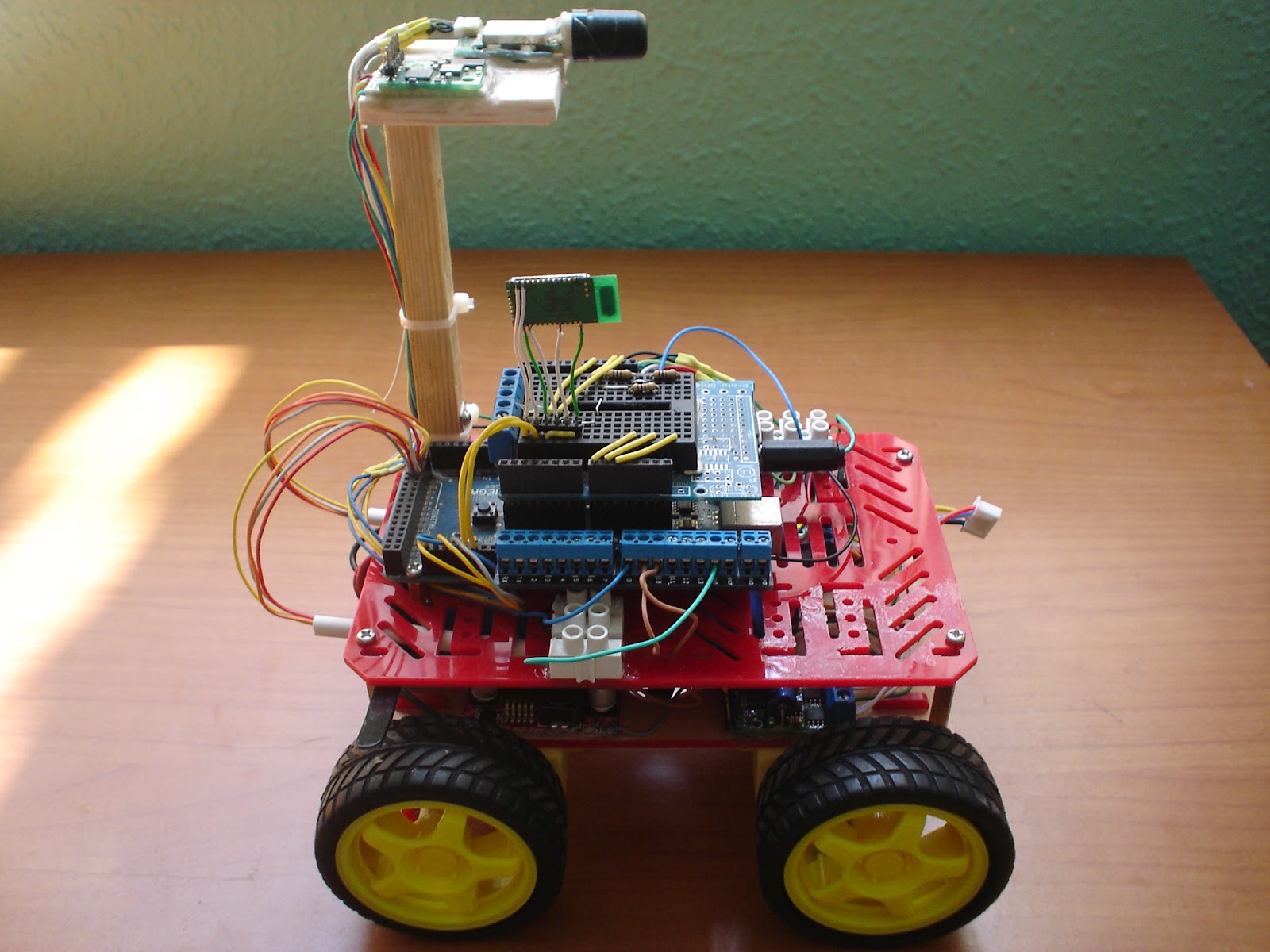
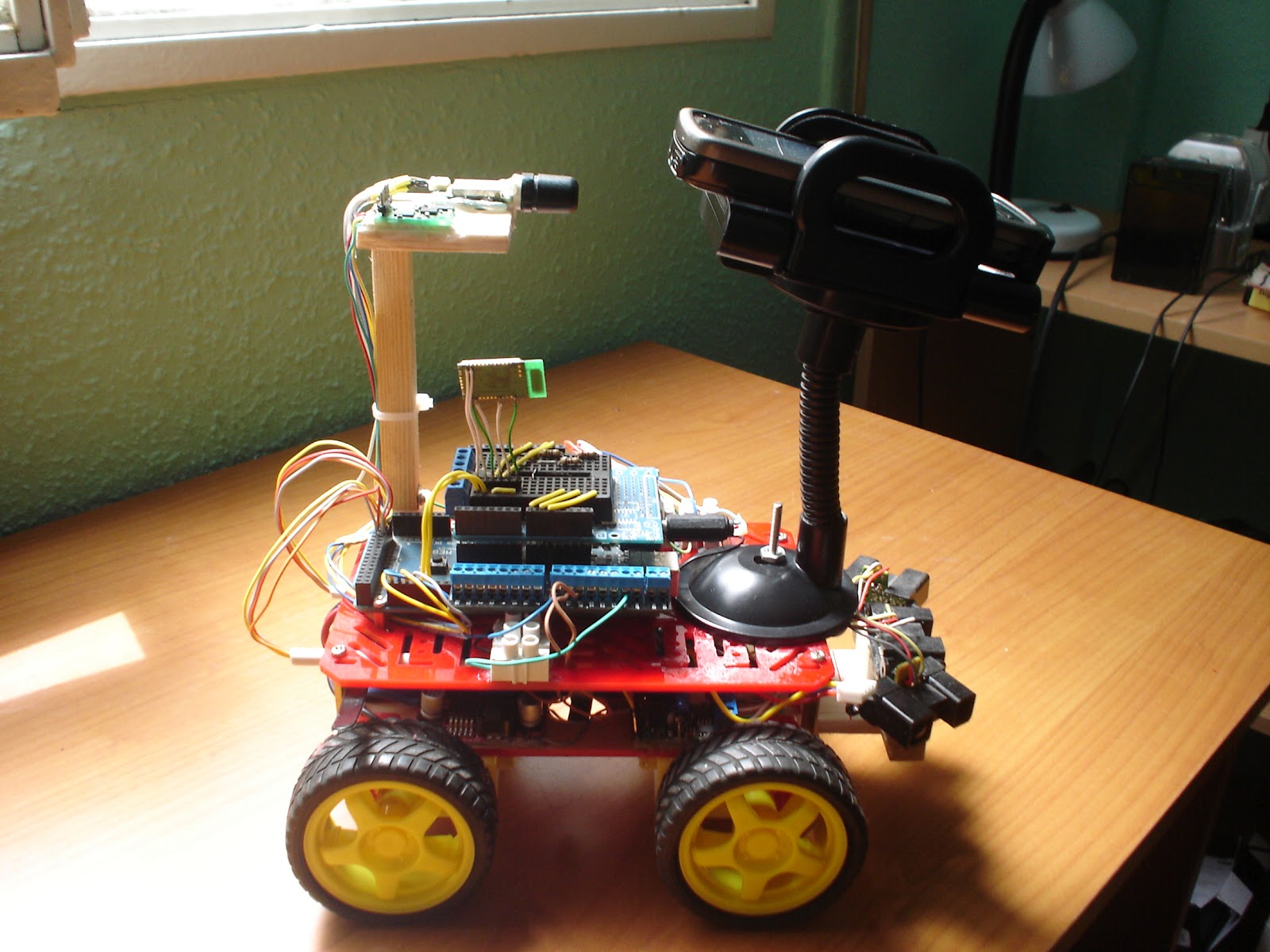
14WDplatform
1lipobattery
2buckconverter(* not strictly necessary)
1Arduino(I use Mega)
1BluetoothModule
1 GPS(not used in part one)
1 Compass(not used in part one)
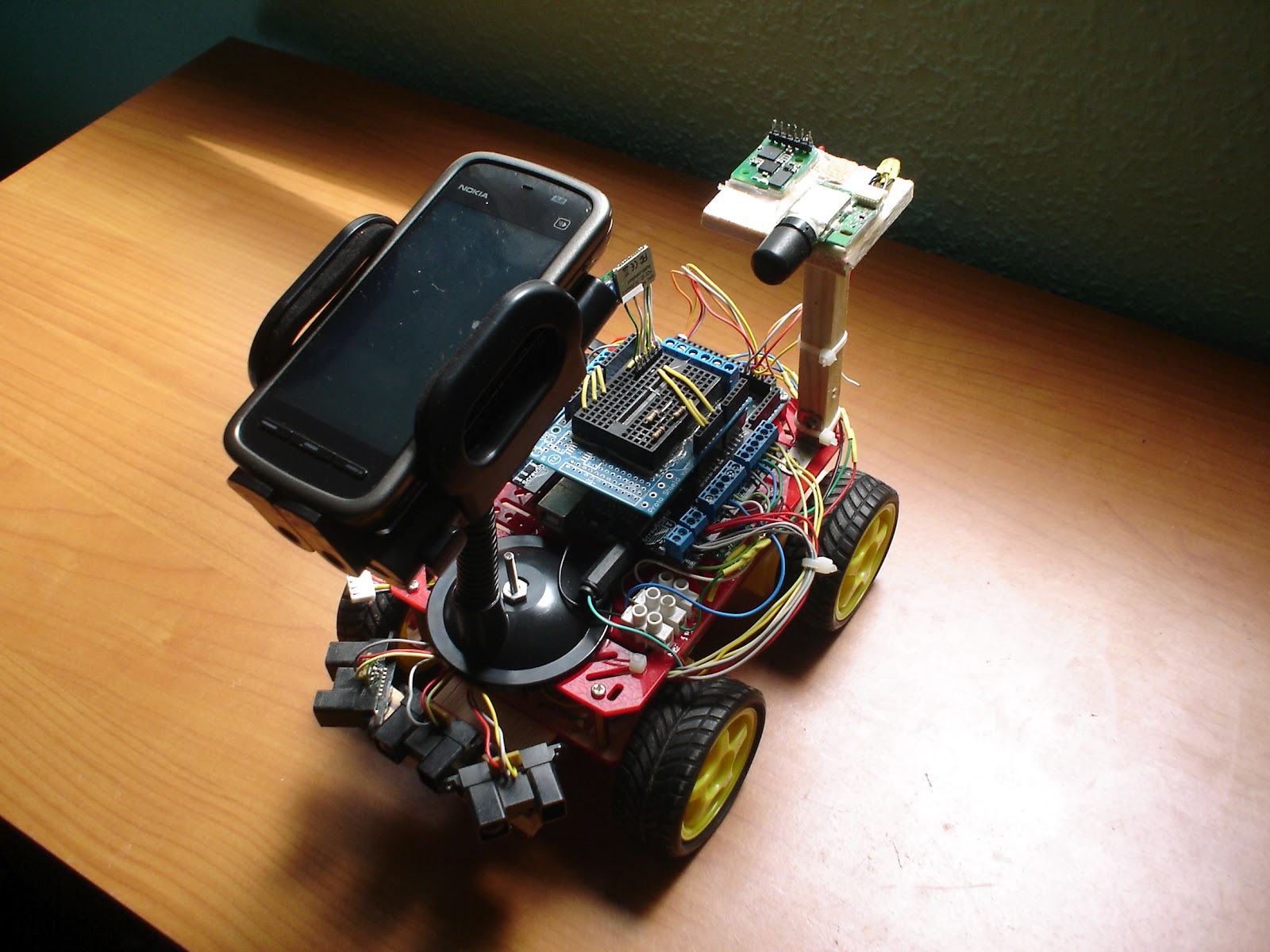
1 MobileNokiaSymbianS60
We now turn tothe programming ofthe phone, I haveobtainedinformationon this page:
Thisisthe codefor usingblutoothcommunicationbetweenNokiaand the robot:
Thanks
Arduinocode:
 ;
;
The arraysize depends on the amount of data you are sending, in my case the start character is"$" and the end character is"&". With the stored datain the arraywe only need tosubtract 48,this is donebecouse the mobile or the serial port of your computer sends data in ASCII, and mobile sendsone character at a time. Forexample if we have the number "17", the mobile phoneor the computersends "49 = 1 and 55 =7"and now ifwe subtract "48" have to "49-48 = 1 and 55-48= 7"but these are two separateissues butwe sent theseventeen for this reason we have to multiply units by 1and tens by10. If we have hundredsas onenumber it has to bemultiplied by 100 and so on.
Rightnow we do this "(1 * 10) + (7 * 1) = 17. This is shownbelow:
http://www.developer.nokia.com/Community/Wiki/Python_on_Symbianhereyou will findall the information neededto programa Nokiawithpython.
Código Python para Nokia 5230 y Nokia C5




Thanks