


In this final blog article we will be discussing the finer details of finishing the 6DoF Platform, alongside a conversion to a PIC based microcontroller.
Completing the Platform;
With all the parts created for the actual 6DoF platform we needed to finalise construction and mount it for demonstration and use. For the mounting base we used a clear 5mm acrylic base that we cut on our laser cutter. We found in testing that sudden movements could cause the whole platform to shift around the desk.
For the platform base we also printed some specifications of the platform for show visitors to see. We did this using our UV printer that we have here at Matrix which allows us to print on any relatively flat hard surface. It works much like a desk jet printer, but instead of regular air drying inks the ink is cured hard via UV light.
Below you can see the final design of the platform, with the Arduino Uno controller placed in the middle. The platform was an excellent exhibition demonstration for us. It allowed us to easily engage with visitors, and discuss both our abilities in rapid prototyping and our Arduino support.

Converting the 6DoF Platform to a Pic-based microcontroller;
This final section of this article, and indeed our series of articles is the conversion of our platform to a PIC based microcontroller. One of the KEY benefits of Flowcode is the ability to switch between microcontroller platforms with great ease. Imagine the scenario; you work as part of a team creating new products in the Research & Development department. You want to rapid prototype a system as we have here with the 6DoF Platform. You choose a microcontroller that you think will be suitable. You invest time developing code only to find 2 weeks in that the particular family is not suitable, perhaps because you didn’t foresee a problem or the project specification has changed Not only do you need to change microcontroller, but you need to swap complete family of microcontroller.
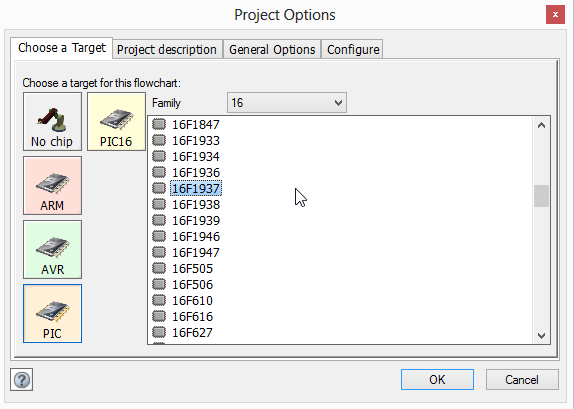
This is where Flowcode offers a very powerful solution. Swapping between microcontrollers in Flowcode is as simple as a few clicks. You navigate to the project explorer and change the target chip as seen in the picture below. Flowcode has been designed to take away all the frustration, complexity and time consuming elements of changing microcontrollers. It’s simple, really simple!
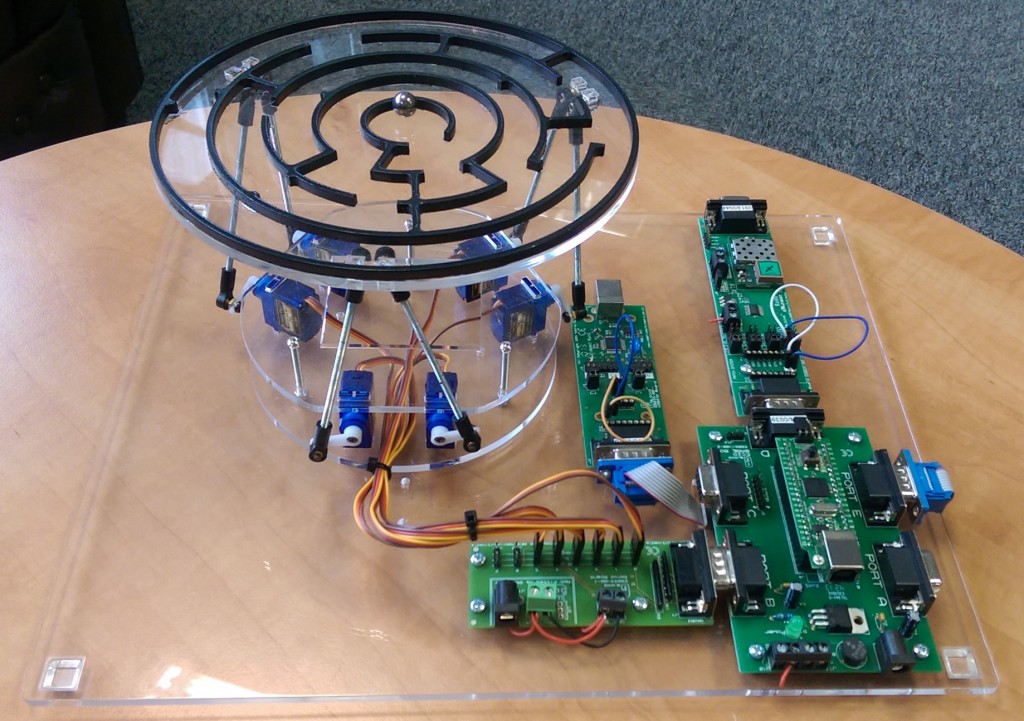
In this example, we wanted to change the microcontroller to a PIC-based product to align with our own internal hardware that we develop. Our most popular microcontroller board is the EB064, a 16bit microcontroller which allows users to prototype designs based on their controller of choice. We also offer a range of peripheral boards that add additional functionality called eBlocks. For the 6DoF Platform we also required a servo controller eBlock board, a Bluetooth eBlock and an RS232 eBlock to send live data back to the PC to update the simulation live.
Upon changing the target device in Flowcode, we had a few changes to make reallocating port assignments for hardware, but this was all achieved through the properties toolbar within Flowcode, which again provides a nice graphical interface.

Component properties are easily changed through a graphical interface in Flowcode
Here we have it, the same 6DoF Platform, but now utilising a PIC microcontroller instead of an Arduino. The whole conversion process took approximately 3 hours, including re-cutting the base plate to allow the different mounting of the eBlocks.
Here is a video of my wife having a play.
Top Comments