


This project is part of a whole implementation which ranges from Matlab / Simulink models to dynamometer to a electric vehicle for road testing. The idea is to do the modelling on the computers of the various components within an electric vehicle drive train and then use the results to test the findings on the dyno for validation purposes and then use them in our electric vehicle as proofthat it works in the real world.
The final aim for me (personally) is to come up with new control strategies and test those as part of my PhD in EV drive train optimisation.
For the modelling we use Matlab / Simulink and the current final models include the inverter, indution motor and control strategies as well as DC-DC converter models.
The setup we have for the Dyno is the same setup we are going to use in the conversion of our Nissan Micra. The reason we choose a conversion strategy is to give our CAD people some experience to play with scanning motor bays (and converting the scan data in to cad models and reproducing components and adjustments to the engine bay) as part of other projects where we need this expertise.
The setup we have is a Curtis Induction motor controller which should allow us to program various features of the control strategy. This all seems to be well possible although getting hold of the various software components proved tricky but we got there.
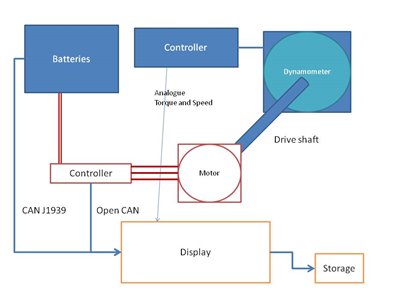
Curtis have 2 CAN protocols implemented but the documentation on the CANopen protocol and its use within the controller seems a bit lacking. We can use the second protocol (CAN VCL - where VCL is the Vehicle Control Language as used by Curtis) )which is better described but has some limitation on the amount of data we can transmit from the motor controller to the display and computer unit.
The problem we are currently facing is the CANopen protocol. We can not seem to create PDO's and have them send to our master display. The reason for using PDO's is the SDO's do not hold enough data. Currently, we are not trying to program any parameters we are just trying to read out data and have it put on the CAN bus.
We probably could use the CAN VCL implementation but I would like to know the CANopen version because programming wise it should work easier (or maybe not lol).
The batteries have arrived, which are lithium ion but a mistake with the BMS connection means we are awaiting a new BMS. Hopefully these should arrive somewhere this week.