



Katherine Scott, software lead and co-founder at Tempo Automation. She is building a desktop Pick and Place machine which aims to automate the “slowest, most distracting, and expensive step of the electronics prototyping process: surface mount assembly.”
SK: So you're working out of the house right now?
K: I'm commuting back and forth right now between Boston and San Francisco, the schedule is roughly a week here, a week there.
When do you officially move to SF?
I'll be there around May 15th, right before Maker Faire. (Maker Faire is a DIY Science Festival)
So tell me about your new gig.
I am the software lead and co-founder at Tempo Automation. My job is to talk to the robot and build the software that runs the robot.
What does the robot do?
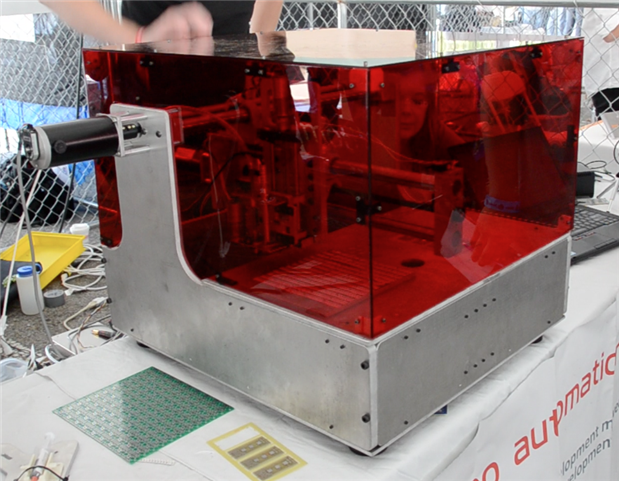
It is a pick and place robot for SMT manufacturing. So we take circuit boards, and parts that go onto circuit boards, we put the parts on the board, and then we reflow the solder and you have an almost finished thing. The pick and place machine will be something you can have in an R&D office, or a University setting or even in your own home or office to do surface mount development.
What is the smallest size of electronic component that the Pick and Place is capable of working with?
We're shooting for 0402....my guess is that the machine will be able to handle smaller parts than that, but from both a hardware and a software standpoint, that should be pretty feasible. We're putting together a pretty nice kit- something that is a bit more high end than you would find in the latest MakerBot in terms of gantry.
In terms of reliability, we are using high quality components so I think we should be able to do pretty well. The quality of the components that we are using and the way we are manufacturing the device, the machine will be perfect for the small production scale.
How small is a 0402- a grain of rice?
A small grain of rice, 2 heads of a pin is a good comparison.
How many reels will the machine be able to hold?
So this machine doesn't have actual reels the way that traditional Pick and Place machines do. For a machine this size, and for the price point we are trying to hit, you really can't use reels. Most of the people who are doing prototyping don't want to buy a whole reel of every component that they want to use. (A reel can hold several thousand parts)
So what we are doing is creating these boards that allow you to sit down and cut a chunk off a reel, just like you would cut a piece off of a bolt of fabric at the fabric store. So you can order say 100 of a component and you lay it onto a holding device. This device is then shoved into the robot and the robot picks off of that versus picking them off reels.
How many holding devices will the Pick and Place have?
I think of the parts tray as being expandable, the way that a server rack comes in "U" units. So the parts tray can hold a one unit reel, a two unit reel, etc. So basically you configure the parts tray to suit your build by popping out these little divider units. It is a pretty slick design.
What kind of work did you do before getting involved in Tempo Automation?
I was a computer vision engineer for Essess here in Boston and before that I was a co-founder and Director of R&D at Sight Machine and before that I was a Defense Contractor.
Can you talk about your work in defense?
Sure. I worked in at what you would call a mom and pop, husband and wife company with 50 employees, possibly the only woman owned defense contracting company in the Midwest.
The reason that I wanted this job was that it was like Grad School Lite. In the sense that you would go in and write a government proposals to build X and propose an idea, and if it got funded, then I would get to build it. I did quite a few of these SBIR (Small Business Innovative Research) grants. So I cut my teeth on seeing a lot of 6 month R&D projects. A lot of them were related to automation and computer graphics and robotics and computer vision, and these sorts of things. So I got to learn how to build a game engine, and got to work on these awesome interdisciplinary teams. It would be primarily software, but then I'd have an electrical engineer to work with and a mechanical engineer, and a designer. It was a great place to learn how to be a really good engineer.
When did you leave that to first go out on your own?
I originally thought I'd be there for a year, maybe two years and I was going to go to grad school and get a PhD and go into academia, but I was so poor after getting through college that I just needed cash. I graduated and had only about $100 in the bank and there was no way that I was going to go to grad school with only $100, so I took that job, and I kept winning contracts and designing cool stuff.
Two years turned into almost 6 years. I had this sense of not wanting to be anywhere for more than 5 or 6 years, especially in the same sort of role. So then I did grad school for a couple years and knew after that I didn't want to do a PhD.
I really wanted to design stuff that I could sell and I thought startups were a lot more interesting. I was meeting all of these interesting people and hearing them talk about starting companies building X that could do Y and how would this happen and this was almost more interesting than grad school.
What did you do after grad school?
After school I came on full time with Sight Machine.
What was your role at Sight Machine?
I was a co-founder. I got a lot of really good experience there, I got to write SimpleCV. It also woke me up to a lot of systemic problems in engineering. After Sight Machine I was a consultant for the summer, but then I thought I should get a full-time job because I wasn't sure how the consulting was going to work out. You know all those things we like in a fulltime job, pay, health care...maybe I should go back to that for a little while. But I really missed being out on my own, learning something new every day, even if it is just staying at home coding. You just get so much more done when it is only 2 or 3 people with the same shared vision.
How many people are at Tempo?
Four full time, and a handful or more working part time. The partners are me, Jesse Koenig, an aerospace engineer who is doing a lot of mechanical design, and Jeff McAlvay who is doing the business development.
How did you get started with this group?
I met Jeff at Maker Faire. I was at Maker Fare Detroit, and Jeff had the first version, which was basically an Ultimaker with a camera and a vacuum strapped to it. And he's like I've got this idea and I had also been thinking about this. Basically a Pick and Place is a 3 axis controlled thing with some computer vision feedback and a lot of packaging. So we thought we could do a scaled down version at 1/10 of the cost, just like a 3D printer. So since we were thinking the same thing we decided to just go and do it.
In the fall, Tempo was showing the demo product at Maker Faire New York- how is your progress with the product now?
It's getting there. Hardware is hard. It's not software where I can throw out a beta version to 10 people and have it tested immediately. Every time you build a new version, you find new things to troubleshoot. And it's not even electrical engineering, building a robot is a thing unto itself. With electrical engineering, it's just troubleshooting the board, I go out and make another revision.
All of us are doing this concurrently, there's changes to the electrical design, there's changes to the mechanical design, there's changes to the software. And all of these things are in these asynchronous loops- they are leading or lagging the product development- so we're on roughly the 4th iteration.So we are pretty close- but since I just came on, there's still quite a bit of work to do with the software.
My primary role is getting some of the smarts down that you need in this machine to make things awesome. We're certain the robot can pick things up and place them, but now we want it to be like magic....where you just shove the board in, you shove the components in, and the machine just takes care of it for you.
What are you excited about doing at Tempo?
I'll be doing a lot of the user interface for the pick and place as well. I don't design the buttons and the colors but I think about how they interact with the user and how they actually work- as in what do you actually want to see on the screen.
Getting people's feedback about not just the colors and the icons, but about how they interact with the robot to get a task done. Also making the user interface similar to the way things work in existing CAD software.
The robot has a camera head for looking at the circuit boards and the component trays. Circuit boards are very well defined visually and it should be fairly easy to take photos of boards and overlay information in sort of a 2D augmented reality. I don't mean this in the cheesy sense of a lot of augmented reality application, but simply you have board images with the build information superimposed. When the robot starts it scans your board, which we have to do anyway to find the fiducials (registration marks that are printed on PCBs for set up) to set up the robot.
As the board is about to run, you see the overlays of where all the individual components are about to go. We already have that information from the CAD file.
When the entire process is done, we can save and archive that information so that we can analyze the yield of the robot; does it make 99.99% of the boards correctly, is it only making 90% and so on, and how can we do better.
The UI looks slick right now, a web page with 2 video feeds but we still have a long way to go to get to my vision. But I have to think of how to lay this out so that it is super useful and intuitive, because for most engineers, this is a black box, and also a new paradigm for people who are building stuff in house. Jeff is bringing people in all the time to test the robot and provide feedback on how the user interface feels and looks.
Robot engineering is electromechanical since everyone needs to understand at least at a basic level, software, mechanical and electrical engineering.
Yes, this is one of those things that is truly interdisciplinary, and where you really have to have detailed knowledge in order to be effective. And you get dirty, you have to be cutting stuff, you have to be able to work with tools, you have to be able to converse with any component that you need that day to run a test. And then you have to track down where problems live- is it a burr sticking somewhere so that this axis doesn't move, is it that the wiring isn't correct or is the PWM not configured correctly. Or is my software all messed up and it is sending something bad- you have to be able to diagnose across a very different sort of stack.
I think for developing industrial machines, it is hard to find people who have that interdisciplinary skillset. Electrical and software seems to have some cross training, but mechanical seems to be completely isolated.
My background is in computer engineering and electrical engineering and I did some robotics work in college. So this is where I always sort of lived, and the cool thing is that I am always learning, I know enough about all of these things to be dangerous! I don't believe in rock stars and I don't know if there are rock star roboticists so you just pick bright people who are capable of learning...but you can't have people who only want to do one thing. It's very much a collaborative, integrative process.
I don’t think most EEs are interested in mechanical troubleshooting.
Yes. What’s interesting about working with mechanical engineers is the vocabulary- the vocabulary shapes how you think about a problem and understanding words well and using them correctly, shapes how you work on a problem. As I learn what all these terms are, this bearing connects to this thing and you have to chamfer on this end, it is so awesome to be able to get deeper and deeper into someone else’s understanding of a problem and then you start to be able to apply these words to solving this problem. There's something about riding in the passenger seat while someone else drives that enables you to learn so much.
You're moving out to SF in just a little bit- what do you expect when you get there, will you just start going to an office full time?
The living situation there is pretty crazy, like just finding a place to live. I have moved 5 times in the past 2 or 3 years...moving isn't a problem. I've only been in Boston about 6 months and I've been working insane hours, so no time to meet people and have a balanced life. But in SF, I know enough people where it won't be such an issue.
What else are working on besides this project?
I'm still consulting, but I'm getting older and wiser about these things and getting better about not over extending myself- i just want to do everything that's awesome. And if I see something that's awesome I just want to do it, but at some point you get burned out, I absolutely love what I do, but you can't do it every weekend and every day and expect to be a well- balanced individual. If I do that, the creative side of the brain starts squeezing out, so I have to be really intentional about what I take on. So right now, it's in between consulting and the startup.
What is your timeline on the Pick and Place?
We will take pre-orders rights now, but we'll be doing some crowdfunding...it depends on how rock solid we want this to be before we start the campaign, but sometime in the late summer / early Fall. We’ll be showing it at Maker Faire in the Bay Area (May 17th) and so you can come by and see how it runs and what we're up to.
We are also going to in the not so distant future start building people's boards, partially as an exercise in revenue and also to hammer out problems with the machine.
You have to build many boards to make sure that the boards build correctly every time. We are in that phase where we are Alpha testing- we have some people's boards right now which we are building just to give us something different than our test boards to build. We would like to start taking boards for populating very soon- especially from people in the Bay Area, same day, next day, if you come in with a stock of components that you need, you can just drop them off.
Kind of like how you used to be able to have film developed. 60 minute pick and place!
So that's where we're headed but there's still some work to be done.

To contact Katherine:
KatherineAScott@gmail.com or Twitter @kscottz
To contact Tempo Automation:
(415) 320-1261

