


The JECCbot mini is an Open Source Outdoor Robotics platform which can be manufactured by a regular 3D printer.
The whole project and source files and production files and description is available on github: https://github.com/generationmake/JECCbot_mini
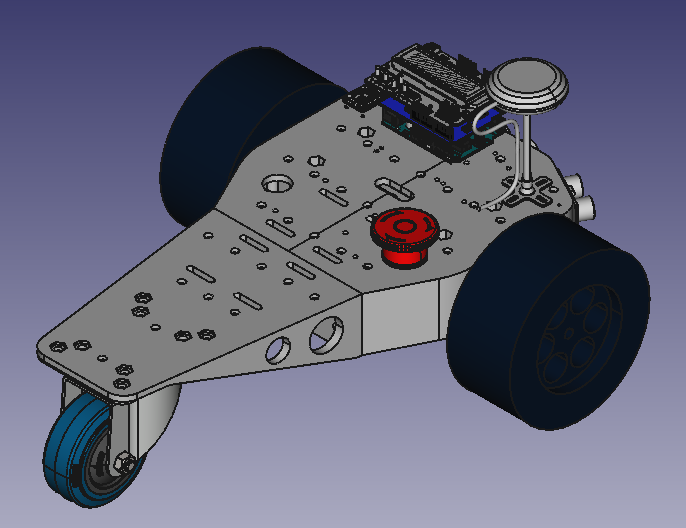
The chassis was constructed using FreeCAD and the FreeCAD project files are also available so one can modify them. There are also step and stl files to instantly start printing
The main goal is to make an easy entry into outdoor robotics. Outdoor robotics are a little bit different to the common known robot kits which drive on your table top or in your living room. Outdoors you are confronted with nature and your robot must be a little bit bigger so that it can drive over your lawn and isn’t stopped by every little stone. Additionally it needs more power to climb hills or overcome little obstacles like stones. Finally it has to cope with the weather because sometimes it starts raining when you are on a run. So it has to be somewhat water proof.
There also exist some contest for outdoor robots:
- Robotem Rovne https://kufr.cz/view.php?nazevclanku=registrace-na-11-rocnik-robotem-rovne-je-zahajena&cisloclanku=2019030001
- Roboorienteering http://robotika.vosrk.cz/roboorienteering/index.php
- Field Robot Event https://www.fieldrobot.com/event/
- Robotour https://robotika.cz/competitions/robotour/en
All these contests have in common that they are outdoors and that the robot has to drive over streets and lawns. Navigation is mostly done via GPS. Sometimes the robot has to carry a small payload. But all these contests require an emergency switch so that the robot can be stopped in case of an accident.
The JECCbot may not be the best fit for all these contests but it should be OK. More sophisticated robots are also more complicated and more expensive. But feel free to adopt the data and construction of the JECCbot mini to your needs.
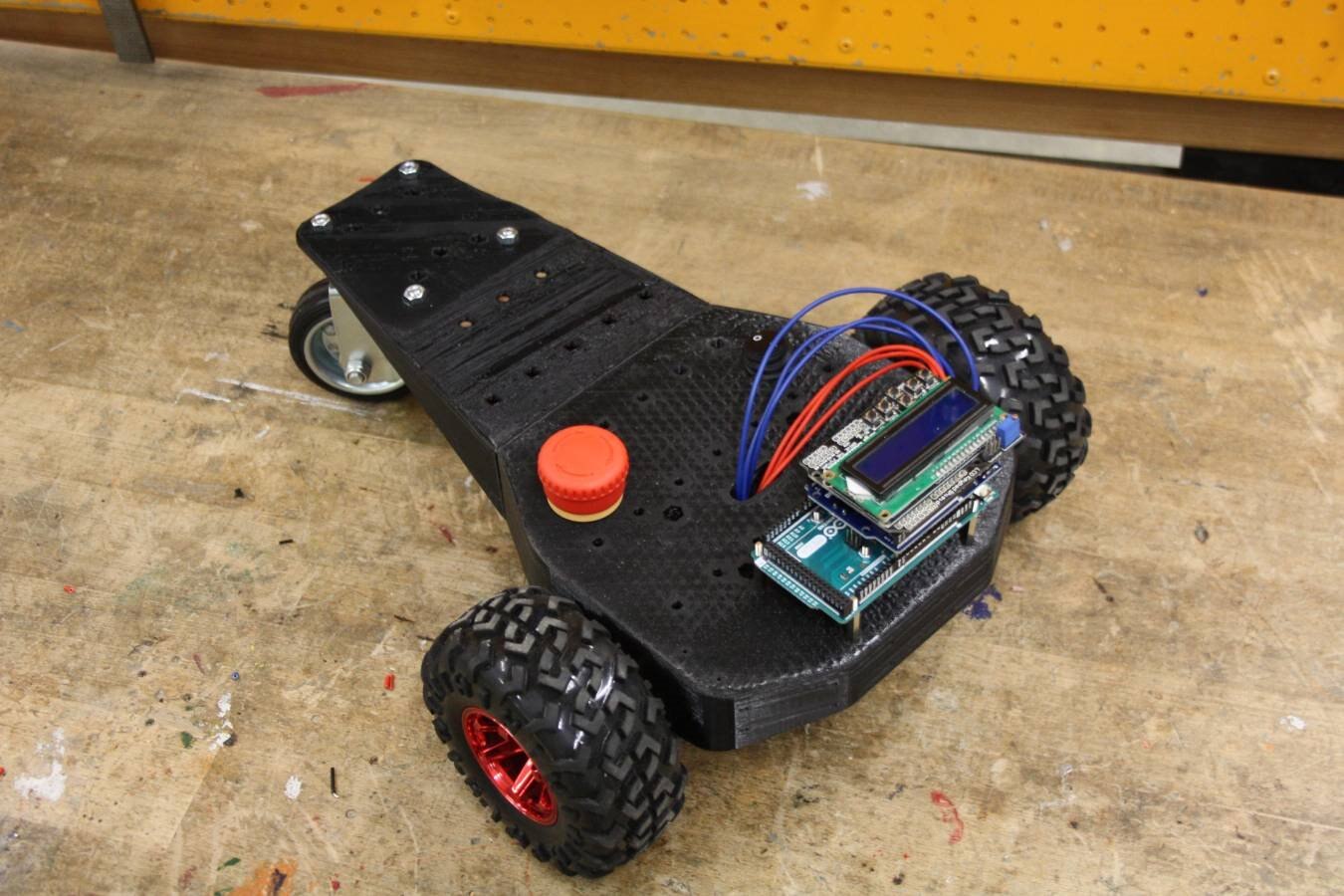
The JECCbot mini should be the easiest and cheapest way into that topic. The main chassis consists of two parts which can be 3D printed on any printer that has a volume of minimum 20 x 20 cm. It may take several hours until printing is finished. The whole chassis is 40 cm long and 20 cm wide. The whole robot with wheels and electronics is about 45 cm long and 35 cm wide and weights about 1.5 kg. The robot uses differential steering because it keeps the mechanics simple and is good enough for the tasks. Nevertheless there are definitely disadvantages with the roller wheel like blocked wheels.The robot needs a few additional parts like gear motors, wheels, switches and batteries. Sources of supply for these parts are on the github project.
The JECCbot mini has mounting positions for various electronic boards:
- Arduino Uno and Mega
- Raspberry Pi
- HighPowerMotorFeatherWing
- and several sensors like IMU and GPS
The exact positions for mounting are described in the project wiki on github: https://github.com/generationmake/JECCbot_mini/wiki

We understand the JECCbot mini as a hardware platform for various tasks. So we don’t provide ONE electronics solutions but encourage you to equip the robot with the electronics suitable for your task. We just hope we have the right mounting positions on it.
We also made one sample project which controls the motor and uses a Bosch BNO055 IMU. This project uses an Arduino Mega, the Arduino Motor shield and an Adafruit BNO055 breakout board. The Arduino reads out the heading information of the BNO055 and uses this information to control the motors so that the robot drives straight.
Project is available here: https://github.com/generationmake/Arduino_on_JECCbot_mini
Videos
There are some videos of this project:
In the coming weeks and months I will post several projects using the JECCbot mini platform.
I would like to hear your thoughts on the project
Top Comments