


I have been looking at simple walking robots for some time, gathering together examples and looking at how legs work and eventually I decided it was time to try and design my own. To start with I am attempting to design, build and programme a quadbot which is a sort of spider like four legged walking robot. There are plenty of kits available to purchase but I wanted to make my own and to try and produce my own design for it as well. I am sure that it will end up looking similar to others but I wanted to try my own ideas.
I have a 3D printer and I can now mostly create objects that I want using TinkerCAD. My initial step has been to design one leg and construct it. I have selected a simple rectangle for the base or body as it is simple and easy to design. I will be using plastic micro servos through out because they are small and cheap. I have decided to start with a two degree of freedom leg as it is simpler and only needs two motors per leg. This is also the reason I have started with a four legged robot rather than six. With a four legged walking robot the gait is difficult because essentially every time a leg is lifted the centre of gravity is such the robot wants to fall over. This means the other three legs have to be set to move the centre of gravity away from the lifted leg. Anyway, four legs with two degrees of freedom means 8 micro servos, 6 legs with 3DOF means 18 servos.
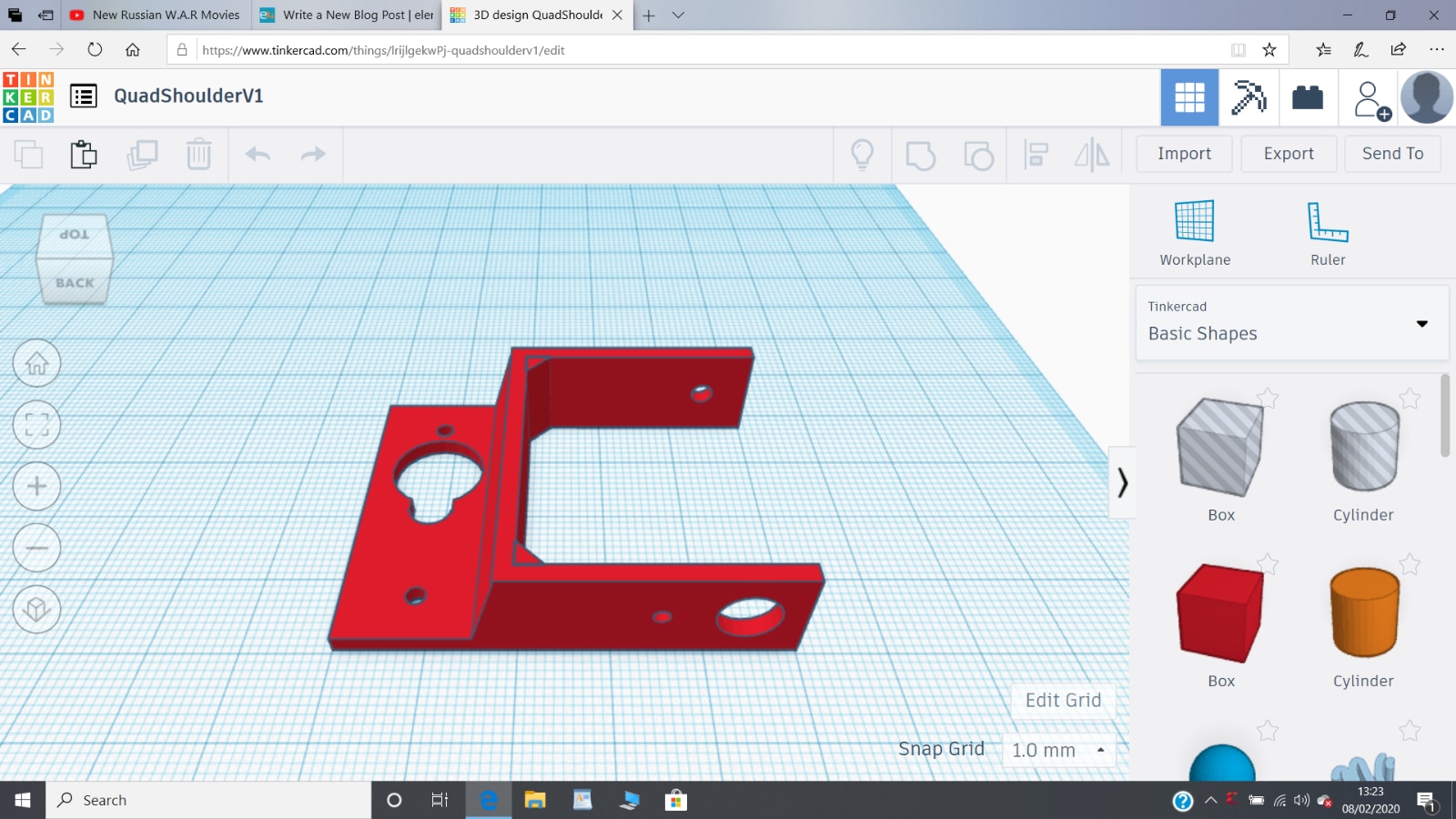
The hip joint is just going to be a 180 degrees (or there-abouts depending on obstructions from the body) then a knee joint that turns the second micro servo through 90 degrees, see the TinkerCAD image below, that will move the leg through something like 180 degrees. In this way I hope to achieve some sort of dragging/walking motion. If this is successful or possibly even if it is unsuccessful, in the future I might try a 3 DOF leg and possible 6 legs as well, but that's many micro servo motors.
I have only created one leg so far so that I can try out various leg movements before committing to 3D printing the other three legs.
I will connect these two servo motors to a Arduino Nano just to get things started. So far I have not produced any software, that will be the next step.
Dubbie