


For the next stage of quadrocopter development I wanted to get something off the ground to ensure that when I get the software correct I will be able to put it to use. To do this I brought out my trusty 3D printer and SketchUp software and got designing the CAD that would make up the skeleton of the quadrocopter.
I also started shopping around for the bits I needed to build a working model and so bought some fairly chunky brushless motors and matching 30A speed controllers (ESC). The exact motors I used are HL2215-450 from EMax rated at 11.1V - 14.4V but pretty much any similar motor would do just fine. To go with these I used a propeller mounting bracket I had from some old impellers from a previous quad project and finished off with some matched 8X4 propellers, two clockwise and two counter clockwise. If you get propellers that all spin the same way then the overall effect is that the quad spins round and round during flight making it very difficult or impossible to control. Matched propeller pairs overcome this rotation effect.

This website provided a great means of sanity checking my parts before I purchased:
http://www.ecalc.ch/xcoptercalc.htm?ecalc&lang=en
I originally had matched 3-bladed propellers and the calculator quickly pointed out that these would not allow the motors to spin fast enough to be efficient. The calculator also allowed me to find the most suitable battery size and current wise so as to try and get the most flight time.
The battery I decided on was a 3 cell 11.1V LiPo 2700mAh battery from Turnigy which is fairly heavy but provides a lot of current due to it's inbuilt nano technology. Great care must be taken with these batteries as the output current is potentially very high. All the websites mention "Do not short" so I used heat shrink on all my wiring and take my time whenever the battery is involved.
To control the quad I bought a HK-T6A V2 6-channel R/C controller and receiver pair. The transmitter is of fairly solid construction and the controls seems to work very nicely. The receiver comes in a small plastic case but using my trusty tiny screwdriver I was able to remove the casing and to my surprise this allowed the receiver's I/O to connect directly with a piece of veroboard.

As the transmitter and receiver were so cheap and so easy to use I will do a few examples to show how these could be used with Flowcode v6 to control hardware or to directly control the simulation.
Here is a schematic of the circuit I made on Veroboard to allow my ECIO28P to interface to the electronics.
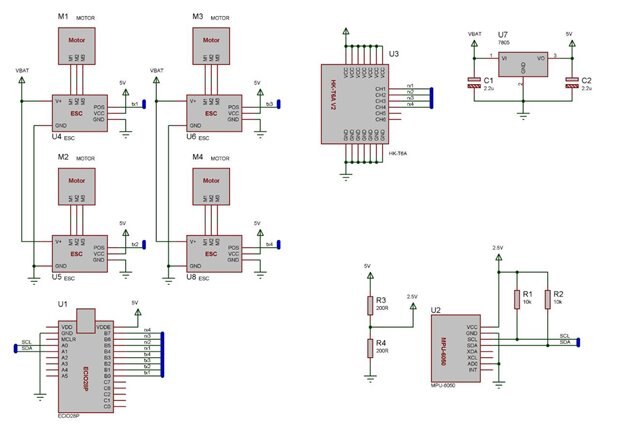
Here is a picture of my veroboard circuit sat on top of the 3D printed skeleton. At the bottom of the picture is the ECIO28P with 4 wires going to the control signals of the ESCs. Above this is the RF receiver and the MPU-6050 Accel and Gyro sensor. Above this is a basic 7805 voltage regulator circuit to convert the battery voltage down to 5V to power the ECIO and other electronics.

Using Flowcode v6 I created a very basic program (ECIO28P) to allow me to control all four brushless motors using the main throttle channel from the R/C receiver as the signal source. The four main channels of the receiver are fed to the upper nibble of PortB which allows an interrupt on change macro to fire whenever any of the signals change state. By copying the pin state of one of the channels and applying to the output pins connected to the ESCs it is very easy to see if the motors are going to work. It would be a small step to add a USB serial component and stream the data through to Flowcode so allow me to see the varying signals on the scope window. As it happens I have a small R/C type servo motor instead which I used to obtain the correct R/C channel for the throttle and then checked the ECIO was processing it correctly.
Connecting up the battery and switching on the transmitter I was able to start the motors at a low speed to get all the motors spinning the right way for their respective propeller. If a motor is spinning the wrong way then you simply swap around any two of the three connections and the motor will then reverse it's direction. If you wanted a brushless motor capable of direction control then a relay could potentially be used to switch the two signals.

Using some digital kitchen scales I weighed my fully assembled quad and it came out at 830g. To test that the motors, battery, ESCs would be ok to lift the device I did a quick test to see if it would at least try and lift up the device. Here is a quick vid showing the outcome.
Back to the drawing board with the 3D CAD I feel, also using ABS rather then PLA might not be a bad idea. I printed the PLA at 40% infil so maybe upping this will also add some more strength. The CAD for the 3D printed chassis will be released shortly onto Thingiverse as soon as the design is a bit more reliable long term.
It looks like at around 10-20% throttle the quad starts to move about so even though I broke the quad it answered my question about whether it will fly or not. Before the next test I want to add in the accelerometer and gyro functionality we looked at in the first post so we get a much more stable takeoff which is much less likely to damage the chassis. The main cause of damage seems to be the initial kick the motors give when starting up so maybe a little reinforcement or dampening in some key areas will help. Good to know it doesn't always go right first time (this is in fact the second time I have shattered one of the arms, Gutted! about half an hour to unscrew everything, replace the arms and screw it all back together).
Next post to follow soon.
