


Finally I have finished the construction of my 5-legged walking robot. It is 30 cm height and weights 2.1 kg.
In the picture bellow, there is a set of parts before assembling:

And a result after assembling:


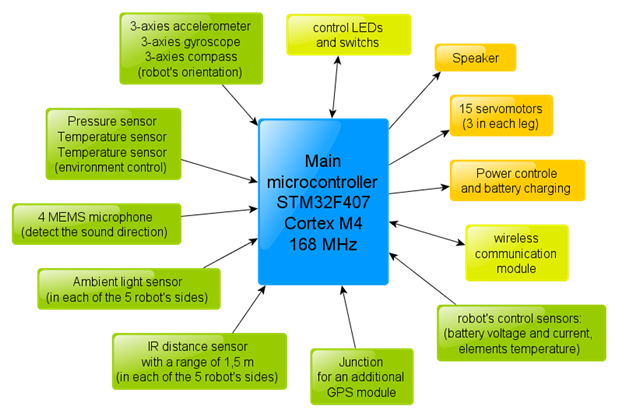
Robot's control system is based on the STM32F4 microcontroller. It is equipped with a rich set of sensors, shown on the diagram below. Robot is controlled from a PC through Bluetooth interface.
The robot is powered from a Li-pol battery (2100 mAh, 11.1 V). On the PCB there is an integrated charging and balancing system for the battery. There is also a buck converter to power all 15 servomotors from a voltage of 6 V.
The main objective of this project was to create a five legged vehicle and to evaluate its walking abilities. The secondary goal was to obtain an affordable robotic platform, which will facilitate further research.
In the future I will place here a video of working robot.
Top Comments