


After very little success with my existing tyres for my SnowBot (SnowBot #1 : Version 1 | element14 | Dubbie Dubbie) I decided to 3D print some snow tyres, or more accurately, snow wheels.
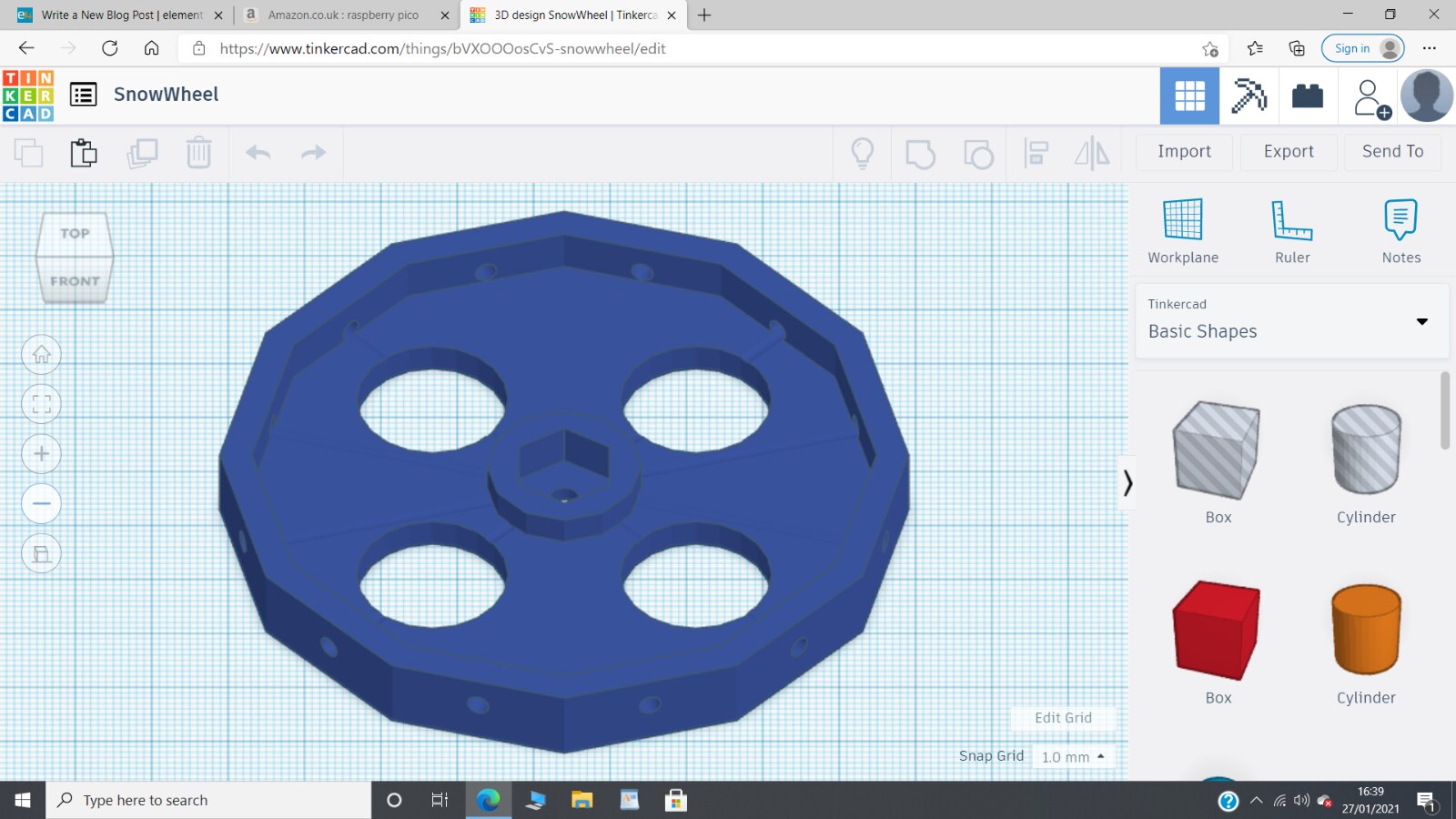
I wanted to have wheels that had suitable protrusions for obtaining grip while moving over snow so I thought a sharp spike type shape would be good. I also decided to use thin wheels rather than fat wheels so that the weight of the SnowBot would push the wheels through the snow down to the ground, or at least hard packed snow. The SnowBit is quite heavy due to the 12V lead acid battery so I thought the spikes might experience some high turning stresses sand so I made the decision to use M3 screws for the spikes, protruding through the wheel rim. Rather than a round wheel I went for a 12 sided circle (?) with one spike per side. The motors on the SnowBot already have a 3 mm to 12 mm hex converter so I decided to keep that. I used TinkerCAD for the 3D design and it was a tricky design as all the shapes and holes have to be combined in the correct sequence.
My first attempt at the snow wheel, shown below, was unsuccessful as I did not realise that a 12 mm flat to flat hex hub needs the points to be 14.1 mm from point to point (who knew that?).
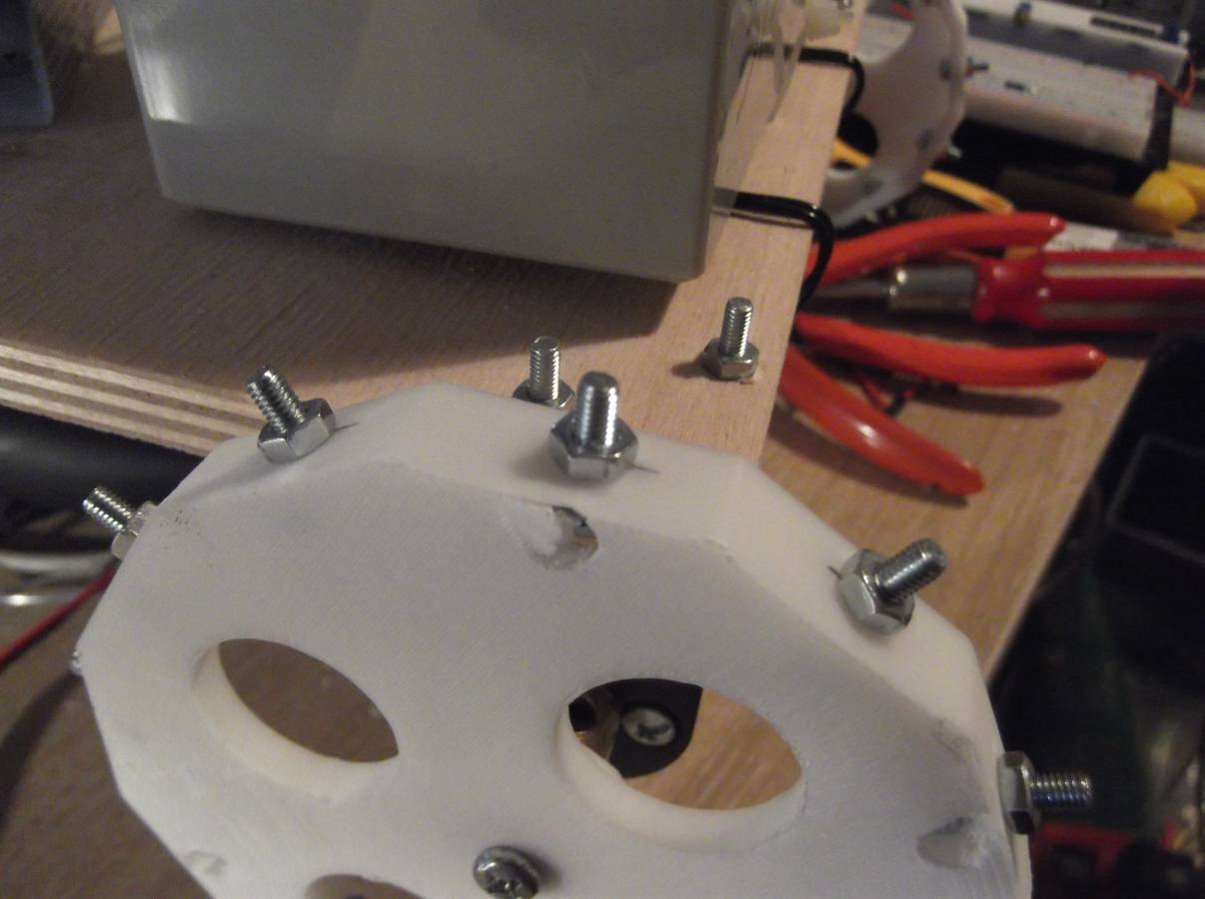
The second attempt, and the third attempt, had the holes for the 'spikes' too near to the flat and there wasn't enough room for the heads of the screw to fit inside the rim. As it took nearly three hours to print each wheel and the snow was melting fast I decided that some fettling with a drill to make the holes bigger would be optimal so that I could force the M3 screws into the holes. The results can be seen below. The 'spikes' do point outwards a little but they will still work.
By the time I had bashed everything together it was almost dark and there wasn't a tremendous amount of snow left. Still, with a torch in hand I ventured out to see how my upgrade SnowBot would fare. See below for the action.
As you can see, some success and also some not success (failure?). In a straight line on some snow the SnowBot seemed to progress well. However, on turns, which used only one motor, it did not do so well. The trailing third wheel is just a standard chair caster wheel and this introduced significant drag during the initial part of the turn as it hit the snow. Also, when the snow ran out and SnowBot crossed some paving stones there was some wheel slippage as the screws did not get a good grip. When it reached the muddy part of my lawn then the spikes stopped working as well.
I think what I can say from this, is that my snow wheels are better than the existing tyred wheel - when on snow anyway, but they are not that good. It would seem that four wheel drive with some knobbly tyres might be a better solution. Sadly I cannot test this as the snow has now all gone. You never know, it might snow again and then I might be able to try out four wheel drive.
This has been a useful learning experience in my ambition to create an outdoors mobile robot.
Dubbie
Top Comments