


Okay so finally I'm going do describe some of electronic parts that I'm creating for Stingray.
For starters I have to say that we lost some time preparing documentation and choosing standards that we are
going to use. While not a big fan of "red tape" it's pretty obvious that , with project this complicated and considering
that there will be people joining and leaving team , lack of proper documentation maintained from the beginning of project
would bite back eventually. That's why two project that I was once part of fell to dust , one because almost all people
that knew our creation inner workings left and there were no way to introduce new people to half finished device and another
because people that were on project lost track what they were doing. So you probably can now understand why I felt need
for starting my work with project with this rather dull and unwelcome part of development process that is initial documentation.
For anyone who do not want to read my rant about paperwork start reading from here.
So I started my work on M.C.M. witch stands for Motor Control Module and M.P.M. witch mean Motor Power Module.
Power module is what you may call "raw muscle" because it contains only H-Bridge and no microcontroller , it's
controlled by PWM signal from M.C.M. .
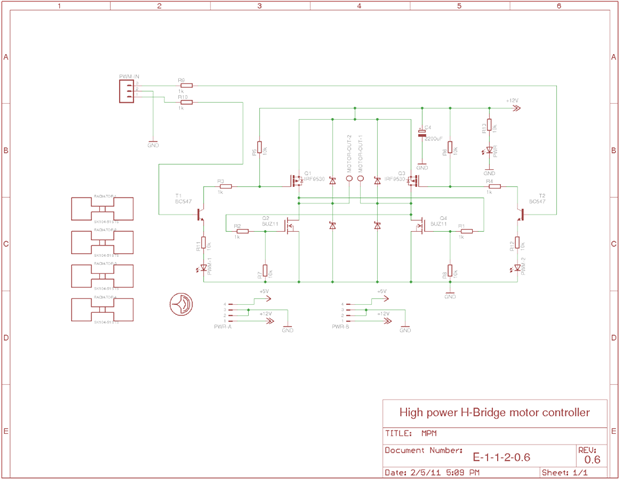
As you can see it's pretty standard solution based on BUZ and IRF MOSFET transistors with radiators , PWM signal
goes on base of BC547 bipolar transistor that in turn influences IRF unipolar transistor gate. There are also Zener diodes
in case if motor would generate some current because of external sources or autoinduction. They probably aren't necessary
because of how much those transistors can take and fact that high gear transmission rate will make turning motor by external
force almost impossible. I still haven't calculated this circuit so there probably are few more obvious bugs hiding , as you
can see it's still version 0.6 , I reserve 0.7 for calculated and 0.8 for tested versions. I will return to describing this module
after I will have a working one and in meantime I will talk about M.C.M. and programming.
Oh and i already have schematics of M.C.M. but there are few silly mistakes that I made there so I will wait with posting
it for a little more time.