


Week 3 of the FutureLearn Begin Robotics MOOC has arrived already, it doesn't seem all that long since I started with Week 1. The content now is much more challenging than the first week, but still understandable.
There is a section on the impact and effect of feedback to control systems which starts with a two dimensional simulated environment showing the effect of friction and slope on the speed of a simple mobile robot and how feedback control can improve the operation.

http://https://www.reading.ac.uk/UnivRead/vr/OpenOnlineCourses/Files/Simulation2/demoSpeedControl.html
Some mathematics is provided on how to calculate the effect of friction and slope in an idealised world which form the basis of the simulation. This was very interesting to me as I want to know how to make my mobile robots better. It was interesting to see relatively how little effect the feedback control had in the examples (obviously carefully chosen) and shows why mobile robots without feedback control do still mostly work.
There was also a simulation of a world which used feedback to control global temperature, using a population of black (heat absorbing) and white (heat reflecting) daisies, called Daisyworld.
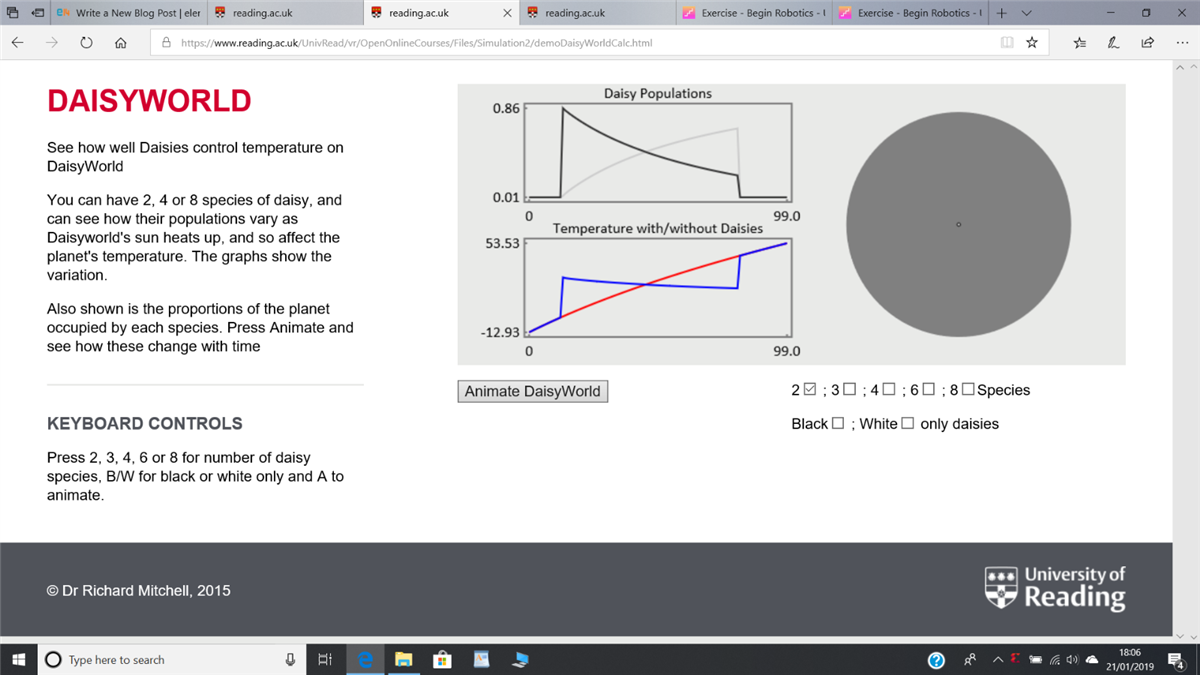
http://https://www.reading.ac.uk/UnivRead/vr/OpenOnlineCourses/Files/Simulation2/demoDaisyWorldCalc.html
These were interesting examples that really provided me with a greater grasp of the feedback concept using more visual methods (it is a MOOC afterall).
There was then a section on using feedback control to manage the rocking effect that the ERIC two wheeled mobile robot has. This was interesting, and there was a simulation to go with this, but it would have been much better to see the impact on a real ERIC. The text implied that there was a video of this but I could not see it, only the simulation. The MyERIC that I have made for myself which is now more rigidly assembled, does have this problem, but it doesn't seem as bad, probably because I am using geared continuous rotation servo motors which have some feedback and damping built into them. I might look at this in more detail if I can create wireless control of MyERIC as any wired communication links operate as a damping effect anyway and disguise what might be happening.
The simulation used for their ERIC has now become much more interesting, allowing a sequence of commands to be typed in and replayed repeatedly in order to achieve the designed path control, which can be used with and without speed control. This allows the impact of feedback to be more visually understood. It does get a bit confusing, because, as with all feedback systems, they are seeking to remove errors, so if you make a mistake, sometimes they can cancel it out. I always thought control was weird.
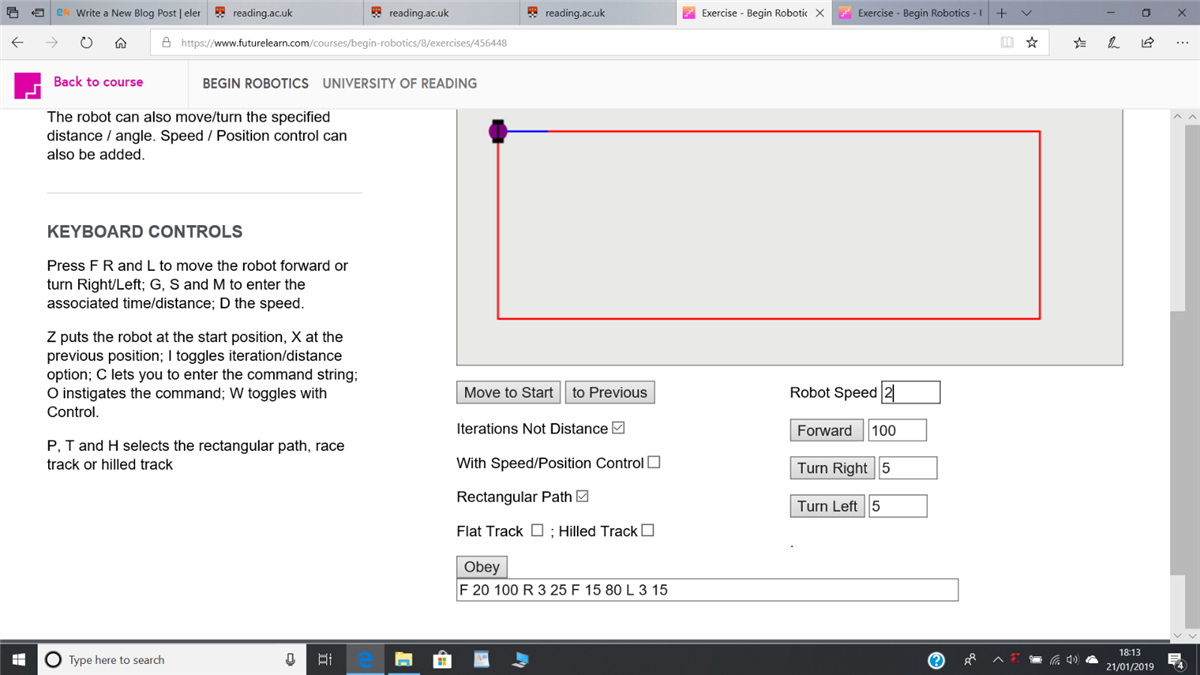
http://https://www.futurelearn.com/courses/begin-robotics/8/exercises/456448
The final simulation was on object tracking and was absolutely fascinating. By just providing some additional feedback to the ERIC simulation world, a much more useful and intelligent (?) output is achieved.
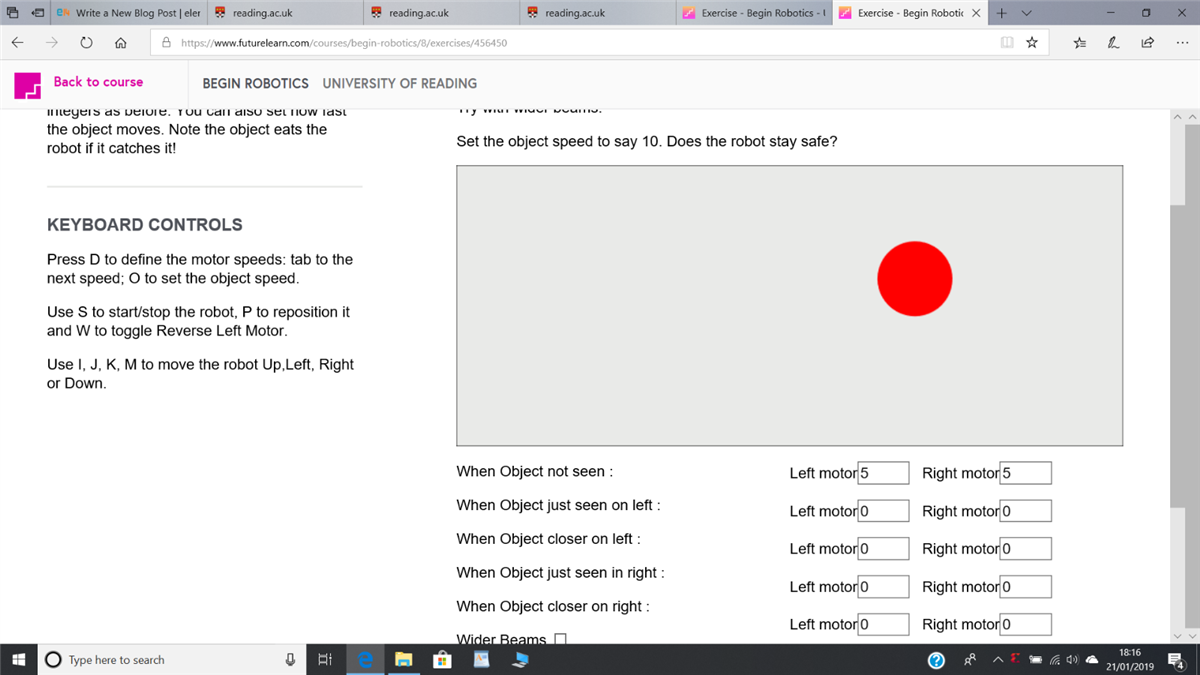
https://www.futurelearn.com/courses/begin-robotics/8/exercises/456450
It is now not so obvious how the simulation works, but with a bit of trial and error you can soon get the hang of it.
The last section was describing and illustrating haptics, which is a sort of force feedback for robotics and similar. This was also very interesting. This was something I had been aware of but not really understood. This has helped by understanding of this topic. There was not much technical detail provided or any simulations - but then again I'm not sure how you could simulate it on a computer.
All-in-all a very good Week 3 for this MOOC. Hopefully Week 4 will be even better.
Dubbie
-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children