


Week 2 of the FutureLearn Begin Robotics MOOC has now come and it contains some interesting material. The MOOC has many small steps (30 in Week 2) some with just written articles. some with short videos and some with demonstrations and exercises. The demonstration of using a H bridge to control a DC motor is good, see below:

http://https://www.reading.ac.uk/UnivRead/vr/OpenOnlineCourses/Files/Simulation2/demoPWM.html
It starts to discuss a technique for measuring the back EMF from the DC motor to measure the motor speed, but the details are not going to be provided until a future week. This is something I have not done before so I am looking forward to finding out more.
The first exercise is to create the parameters for a simulated ERIC mobile robot to move about automatically in an environment, see below.
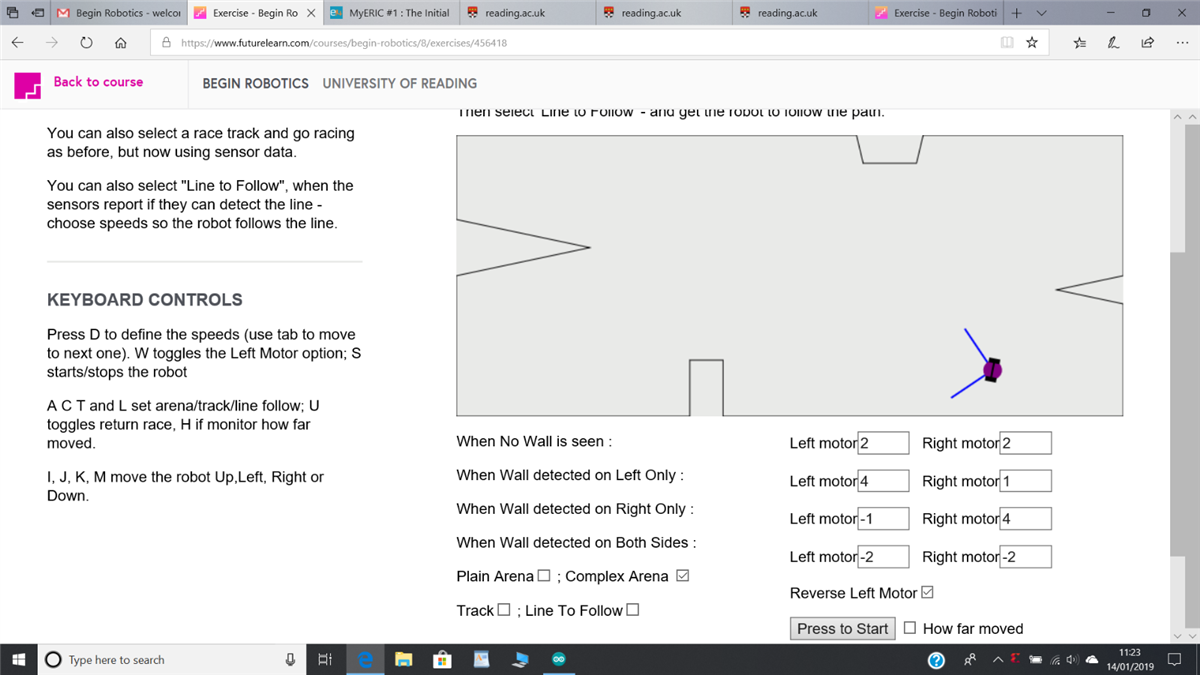
http://https://www.futurelearn.com/courses/begin-robotics/8/exercises/456418
My parameters are mostly OK but if it gets itself stuck into a corner it doesn't always get out of it.
The second exercise uses simulated light sensors to try and move towards a light source. My attempt seems to get it to move away from the light source, which is just as interesting.
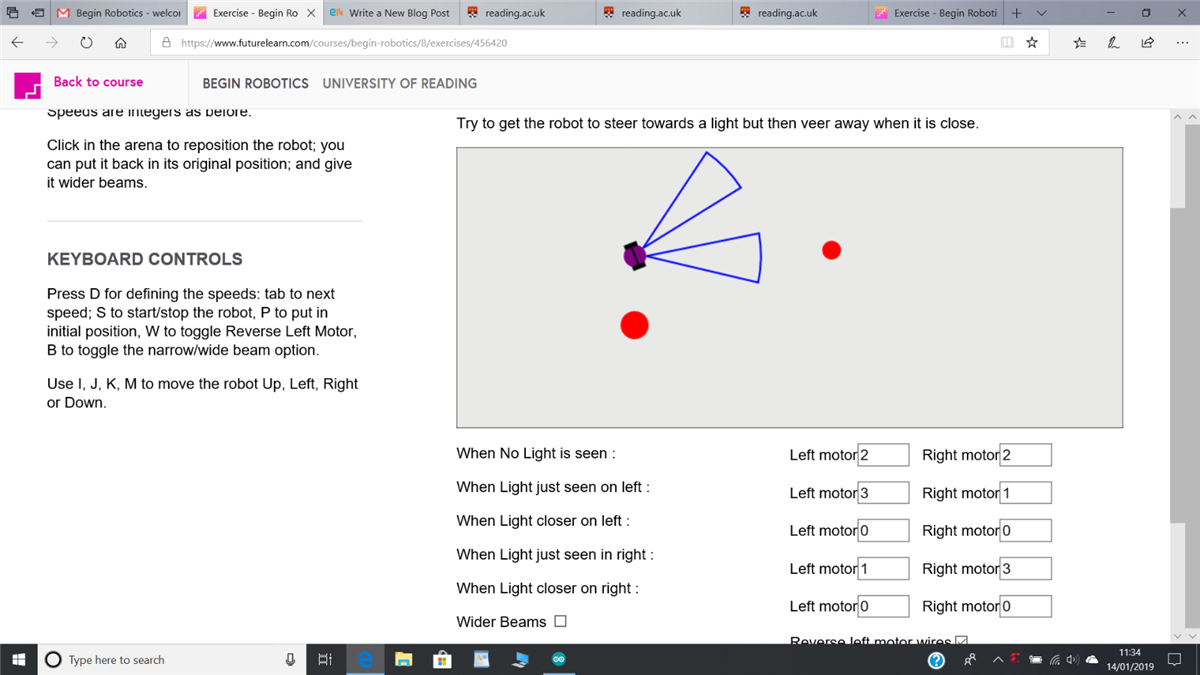
http://https://www.futurelearn.com/courses/begin-robotics/8/exercises/456420
Another mobile robot called Rover is then introduced, which is a tracked vehicle. Not quite as much fun as ERIC, but it does have a gripper that can be added to the front. That looks fun, so I might try making one of those.
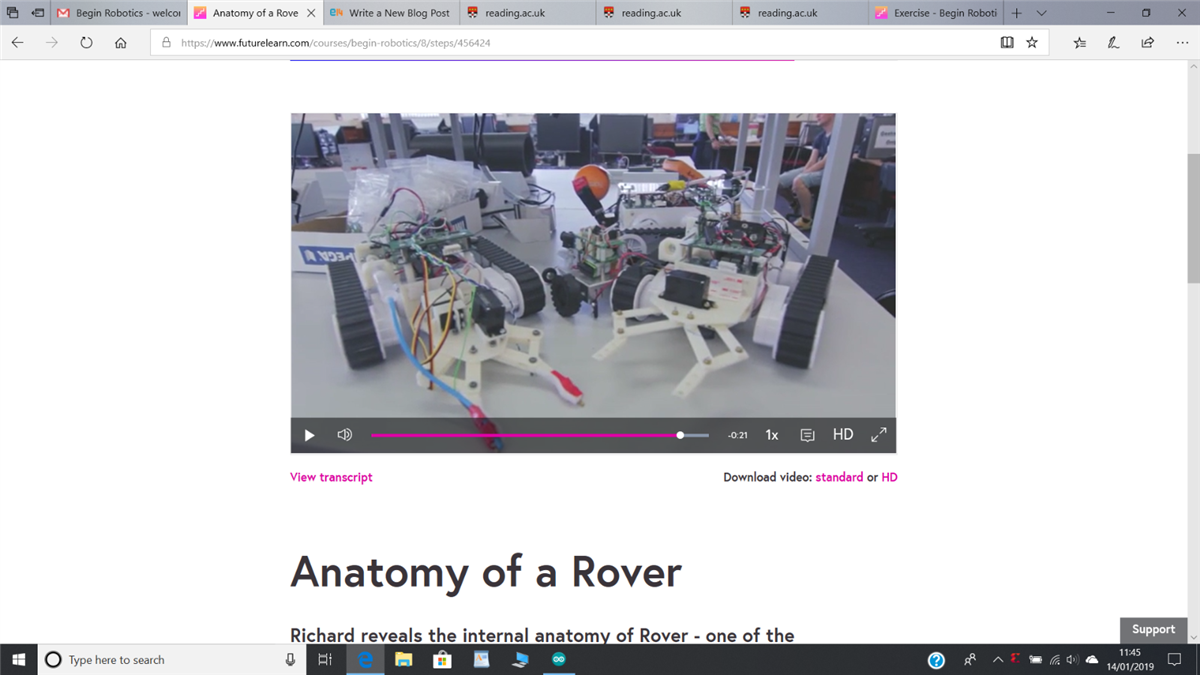
They use the Rover to demonstrate the measurement of simulated earthquakes and to measure how it rotates. The systems are starting to get more sophisticated and interesting although there is not much detail on the electronics and sensors themselves. They then manage to incorporate a toy R2-D2 which responds to voice control. Looks good fun.
The quiz at the end had me stumped again and I was reduced to guessing about the ERIC wheel speed settings, but I could do the other questions. A fun week, better than Week 1. I am looking forward to Weeks 3 and 4.
Dubbie