


My Peruvian mate martinvalencia and I purchased a set of 25LC256 SPI serial EEPROM chips. Our plan was to get them working with the Texas Instruments Hercules LaunchPad MK II. That was back in January. And then we stalled. Martin has restarted the exercise and I'm going to play along.
This blog is our path from Zero to Hero. Feel free to jump all over us while we're doing things the wrong way. |

The Microchip SPI EEPROM
We've chosen the 25LC256. That's actually by accident.
I was going to try out their i2c 24LC256, but either I or the local electronics shop goofed up and we ended up with the SPI version.
The datasheet is available from the Microchip 25LC256 landing page. That pdf is the source for some of the drawings and quotes on this page.
We ordered the through-hole DIP version because there is no intention to use them in a real product.
It's just for educational purpose.
The schematics part isn't going to be a complexity in our exercise. The pin-out doesn't hold any surprises.
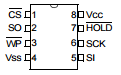 | 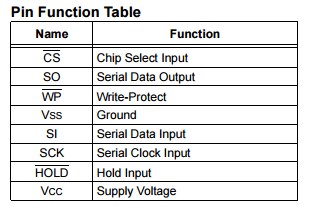 |
We find the 4 common SPI functions
- SI (MOSI/SIMO),
- SO (MISO/SOMI);
- SCK and
- ~CS.
The other functional pins (~HOLD and ~WP) we'll give a fixed value by pulling them high or low permanently. They aren't going to play a role in our communication.
(That is: if we get away with that. I haven't checked the datasheet enough to see if we have to change their value in our simple scenario).
The signal levels of the 25LC are compatible with the Hercules RM46. No worries there.
SPI on the Hercules LaunchPad II
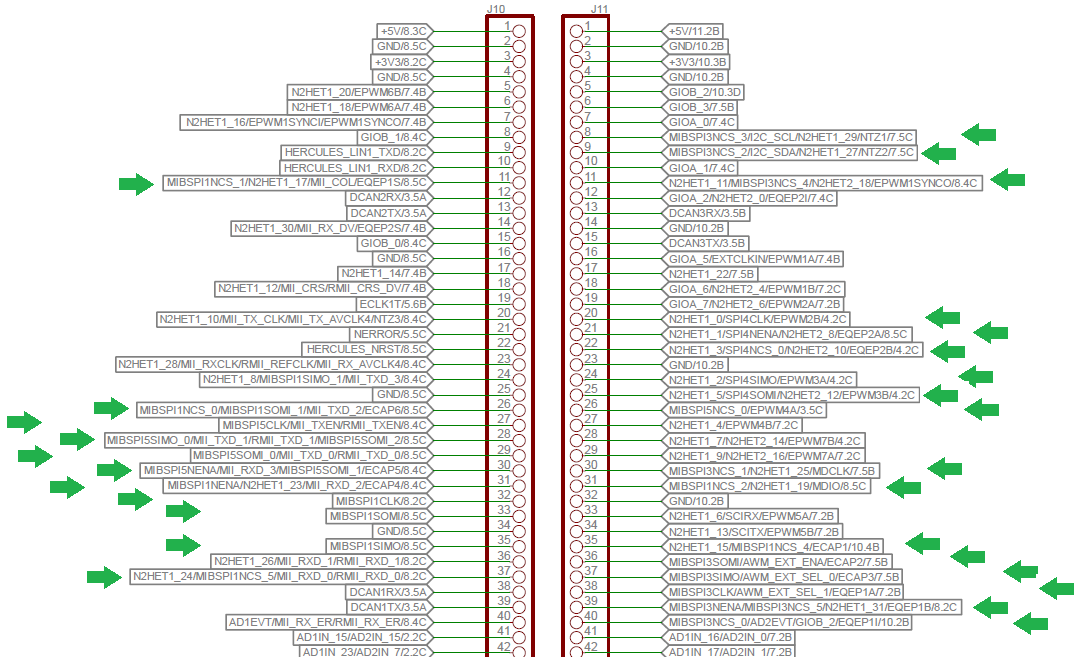
The Texas Instruments Hercules LAUNCHXL2 RM46 launchpad has two types of SPI peripherals.
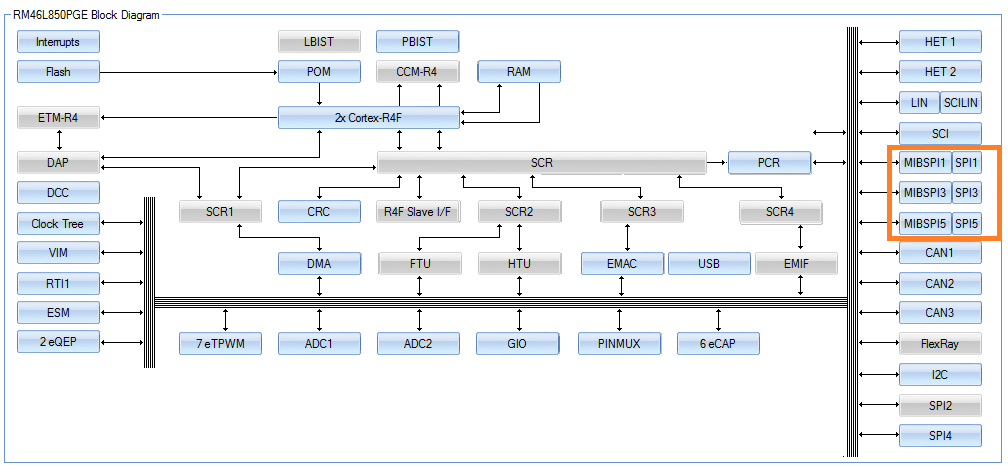
We have access to standard SPI and buffered MibSPI (Multi-buffer SPI).
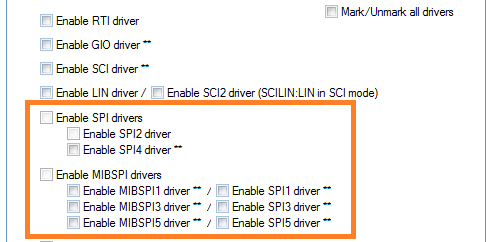
I haven't checked if all are broken out to the side connectors, but you can see on the picture below that there isn't a SPI shortage.
I'm now going to wire up the EEPROM on a tiny breadboard, and I'll start setting up my firmware development project in Code Composer Studio.
Hang on.
| Related posts |
|---|
| part 1: this post |
| part 2: Circuit and Test Bed |
| part 3: Testing SPI Protocol with Bus Pirate |
| part 4: First Trial on the RM46 |