


Its been a while since i uploaded a post about the Systems Project, so sorry if this is a bit longer than normal.
We currently have nine days until the build need finished for display at the presentation. So we are all trying to get this done quickly as we also have our exams coming up in two weeks time.
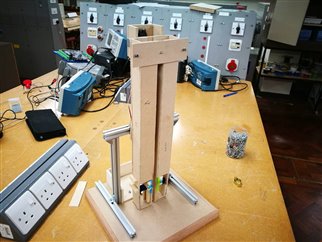

The main design consists of two towers to hold the blocks. Each tower can hold about 10 blocks.

For Sorting the blocks into the towers we have a small platform which rotates 45 degrees either direction to dispense a block into a tower. The color sensor will be mounted on one side of the inside of the towers to. The sorting works when the PC sends a 'G' command, The Mbed reads the color sensor and sorts it into a tower which is not full, and sends the servo command to the FPGA to move the servo.

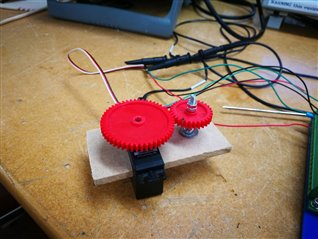
To dispense the Blocks from the bottom of the towers we use a kicker mechanism which is driven by a servo with a 2:1 gear ratio, this will give us about 75mm of movement on the kicker which will be enough to move the blocks into either the Recycle bin or the Dispense bin.
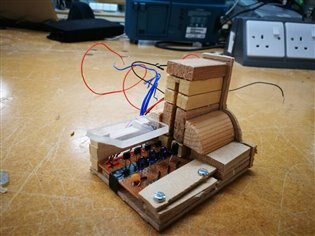
The card reader uses four Sharp IS471S to read the Value of the Card reader and return it to the Visual C# and store the value within the MBed.
The Digital design has been completed, and some modifications have been made to the original servo driver, as originally it was only able to move the servo 90 degrees. I will post an updated version of my Verilog PWM post latter. The FPGA has been flashed so as we do not need someone with the Quartus Software to be program the device every time before we use it. The FPGA has three modes, Sort, Run, Servo Direct Drive. We wait for one of two commands to enter the Run or Sort modes, if it is not that command it is passed directly to Servo Direct Drive.
In the Run mode the FPGA is waiting on one of about 10 commands which will control the two bottom servos in a predetermined manner.
ie; Tower 2 Dispense, Tower 1 Recycle
it will remain in the run mode until it receives an end run command and returns to idle waiting for command
In the Sort Mode the FPGA will wait for commands for controlling the Top servo position
ie; Tower 1, Tower 2
it will remain in the Sort mode until it receives an end run command and returns to idle waiting for command.
Since the Verilog was fully functional, i thought i would add something to make the board look more interesting; and with having several LEDs being unused. It was obvious what to do, Knight Rider Lights;
Ive also wired up the four seven segment displays on the board to show which mode we are in. The green LEDs to the right show the current Serial Data Received.
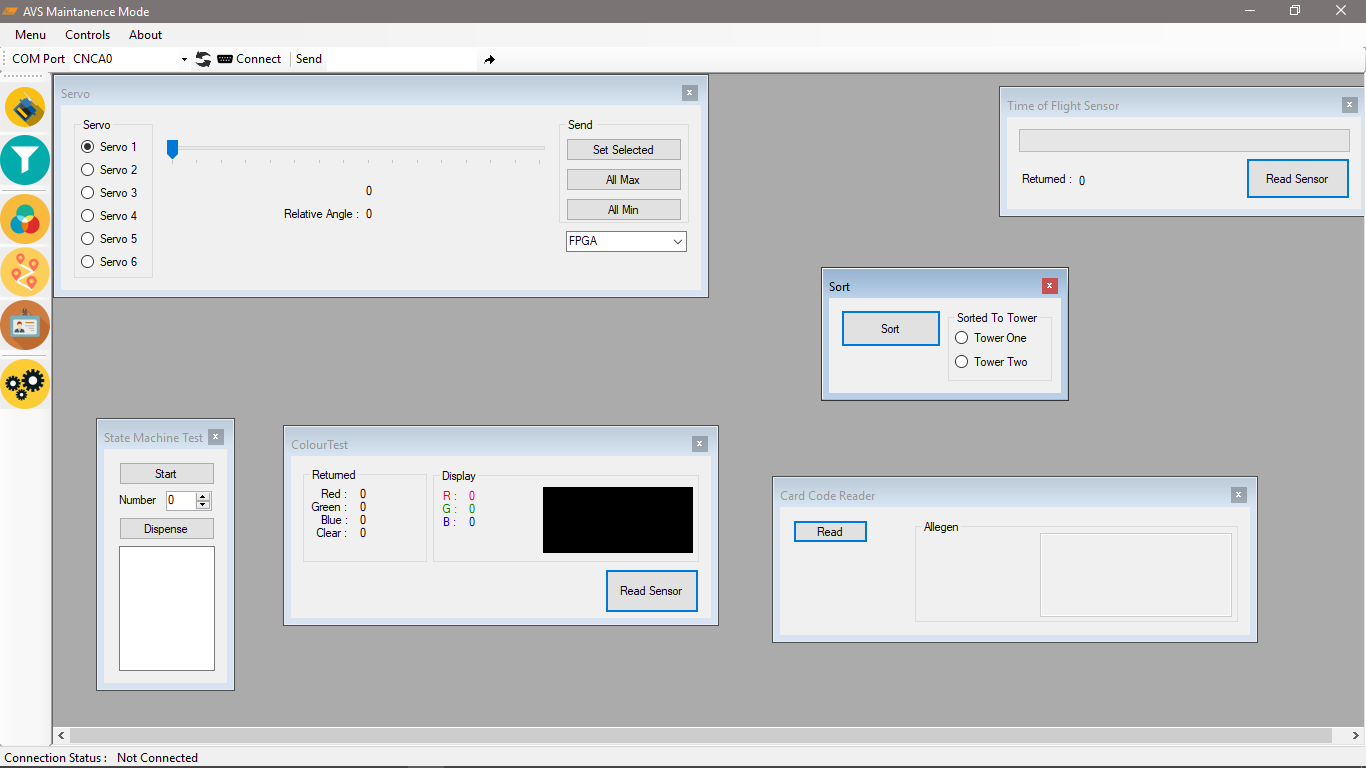
We have also managed to complete the Maintenance mode software and have published it to allow us to all have a copy on our laptops. There are still some small issues with the software, but the majority work and I am relaying on the rest of the team to report back any issues the find with the software.
The only other modifications that need made to the Main software for running on the device is minor modifications to the layout to allow it to go full screen on the tablet without looking stretched out.
There is one more issue that arises during the development of the software. The second language we are using is Spanish, and we tell the customer what color they are allergic to, So think what the Spanish word for black is and say it with an american accent (the current speech language on my pcs). I have tried installing Spanish language packs, yet no luck; if i cannot fix it we may end up changing the language to avoid any misunderstanding.
Top Comments