


I've decided to make an animatronic Tin Man loosely based on the 1939 movie The Wizard of Oz for no other reason than I've wanted to for some time. It seems like it would make a good design exercise. It would also be someone that Bender could talk to when I am away from the house. Since the Tin Man has no heart, it seems like a good Halloween project also. Next to the flying monkeys, he is the scariest thing in the movie. After all, he is a heartless robot with an axe.
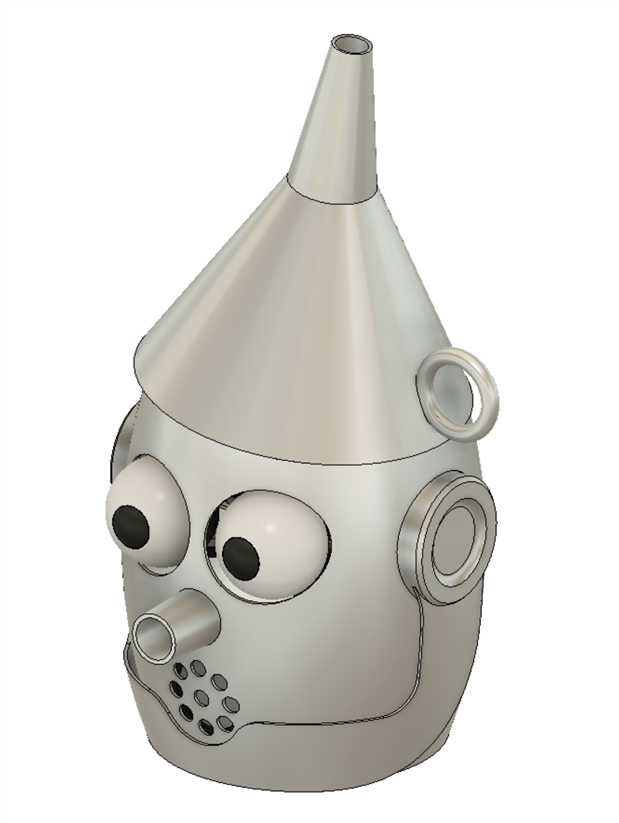
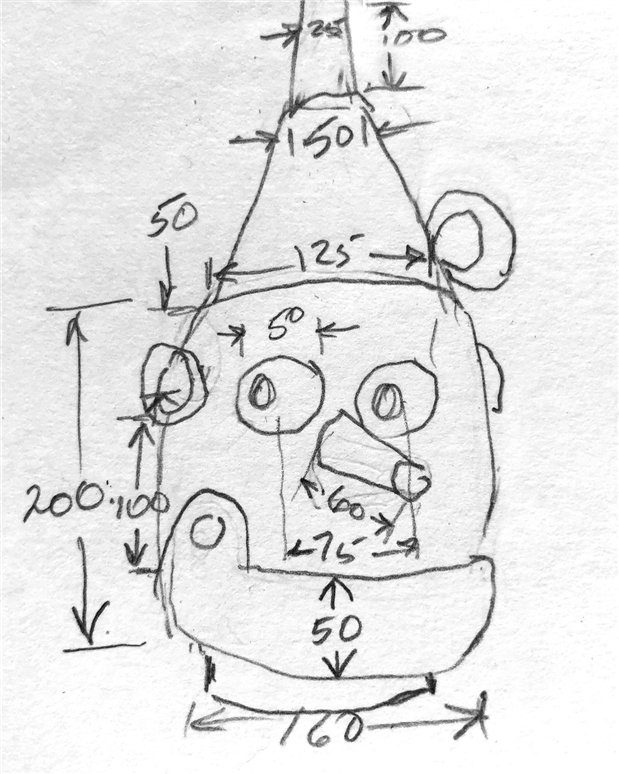
I think most of you will be familiar with the Tin Man. The MGM movie is based on the 1900 children's novel by L. Frank Baum and stars Judy Garland as Dorothy and Jack Haley as the Tin Man, aka Tin Woodman. Since the movie has an actor and not a real robot, I've taken liberties and changed him up a bit. I started with a rough sketch in order to have some dimensions when drawing in Fusion 360. I've become more comfortable drawing with CAD with practice. Here is the original sketch which changed quite a bit as it developed.
The model has the mechanical bits are drawn in for the most part but not the electronics at this time. The image below has the shell removed.

The electronics will consist of an ESP-32 so the Tin Man can be controlled over Wi-Fi and the JQ6500 MP3 player that ralphjy recently tested here.

The 18650 battery and charger/battery management is the same one used in Bender. It is supposed to be capable of 4A at 5V (doubt it) and can also power the ESP-32 through the USB connection. The little servos can draw 300 mA or so and the ESP-32 is pretty current thirsty when transmitting. I may add LEDs at some point also.
I don't want the eyes to be wonky like they were last time with Bender so a prototype was put together for testing. Of course, they are wonky - a 20-second video follows.
That inexpensive servo tester in the video is pretty handy as I was tired of programming something up every time a servo needed testing. Of course, I could have made one myself but not for less than $10. After seeing the eyes in action it is clear that the geometry needs modification to remove impingement occurring in the arms. I did motion analysis in Fusion 360 beforehand but that is an area where I need to improve my skills.
Speaking of servos, I ordered some new ones with metal gears instead of the cheap plastic ones thinking I had used my supply of up. When I went to put the new ones away I found that I had ordered some in the past and forgotten about them :-).
With that out of the way, I got ready to print the shell which is one piece this time. The image below shows the mesh.
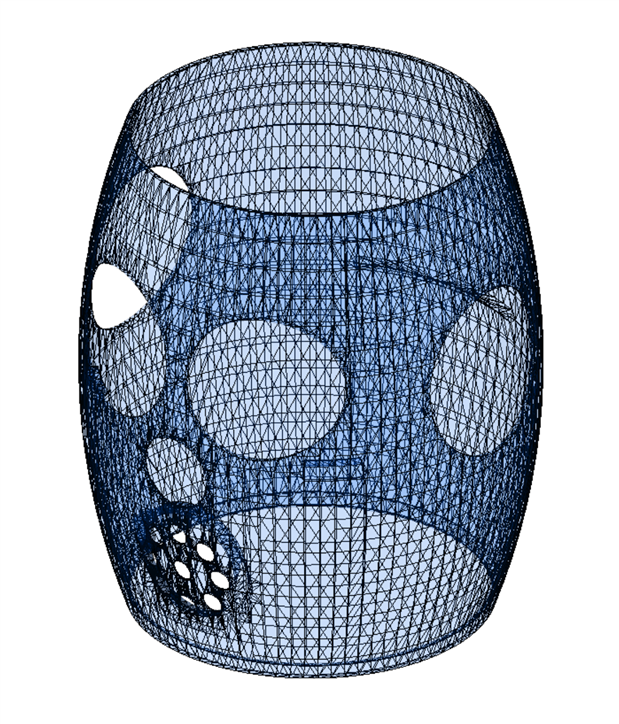
It takes up most of the print volume on my 3D printer and will take more than 15 hours to print. I'm planning to use the same silver filament that was used on Bender.
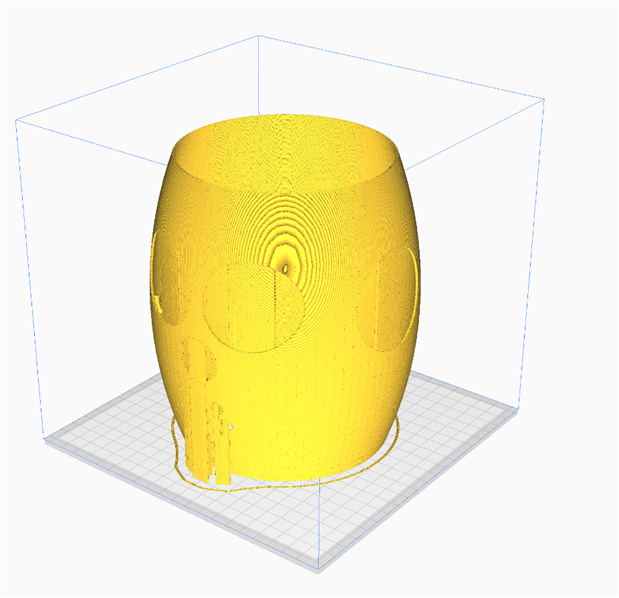
I actually pushed start on the printer and then chickened out. My concern is that there isn't quite enough filament to finish the print. So, I've ordered some more and hope to start the print next week after receipt.
Thanks for reading. Hopefully, I will be more productive than I've otherwise been of late and get this finished in a timely manner.


