


As the setup of the board is perhaps not very interesting and isn’t the key focus of the RoadTest, I’ve broken all of those details out into a separate blog posting to save cluttering the review. In this part, let’s take a look at the setup process and the documentation supplied.
Nice to meet you Dave!
Upon preparing the XMC2GO and inserting it into the base board, the first step is to program it for operation with the kit. While I think it probably would not have been too much of a cost for Infineon to pre-populate the headers and pre-program the boards, I suppose this may have been done on purpose so that users would also get an introduction into the XMC2GO series of microcontroller boards and familiarise themselves with DAVE. With the unprogrammed board powered up, all it does is blink its two red LEDs alternately like a railroad crossing.

Who’s DAVE , I hear you ask? Well, that’s the name of their Eclipse-based IDE. In order to get started, a copy of DAVE and the DAVE APPs need to be downloaded, along with the SEGGER J-Link Software and Documentation Pack. It’s also necessary to download the PWM sample program as well. DAVE doesn’t really need to be installed – once unzipped into its own folder, it can be run directly. The first run takes a little while to get set up, then it asks for a workspace directory which you can redefine.
, I hear you ask? Well, that’s the name of their Eclipse-based IDE. In order to get started, a copy of DAVE and the DAVE APPs need to be downloaded, along with the SEGGER J-Link Software and Documentation Pack. It’s also necessary to download the PWM sample program as well. DAVE doesn’t really need to be installed – once unzipped into its own folder, it can be run directly. The first run takes a little while to get set up, then it asks for a workspace directory which you can redefine.

Then, we can see the main IDE environment, but we’re not ready to go just yet.
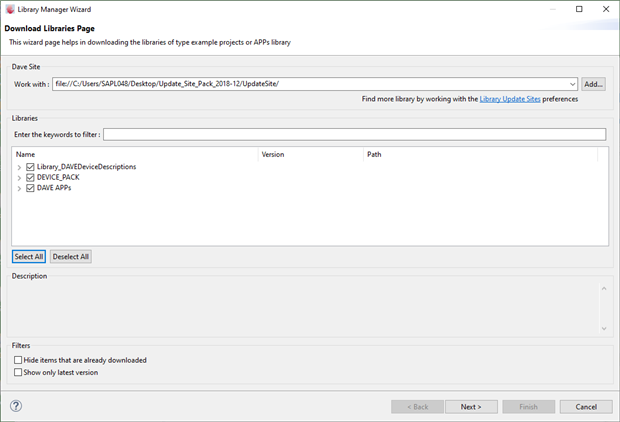
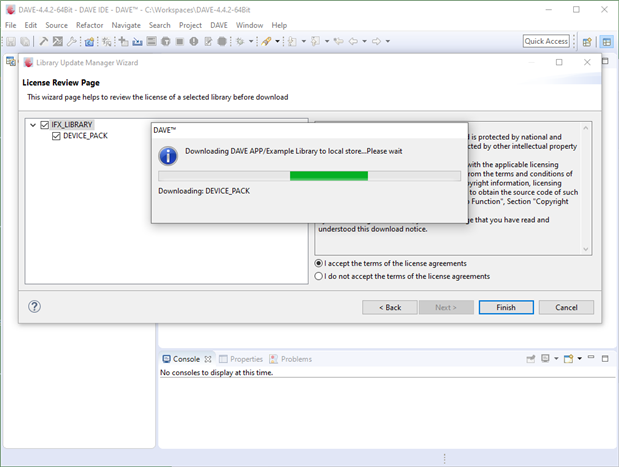
The DAVE APPs package needs to be unzipped and then the updater needs to be run against the local directory to install the apps. This involves accepting the necessary license agreements as well.
Next, the SEGGER J-Link software can be installed to provide the necessary drivers to talk to the board and the relevant programming and debugging ability.
Now, with the sample program, we can unzip it somewhere and import the project.
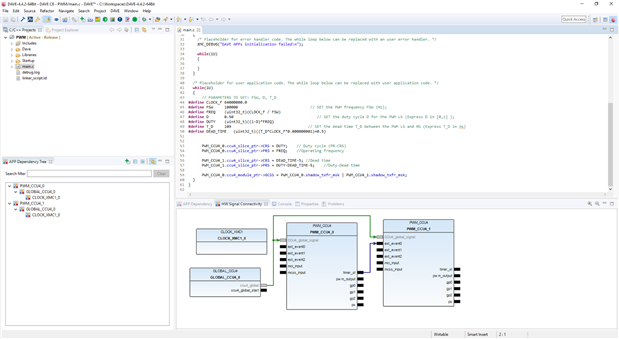
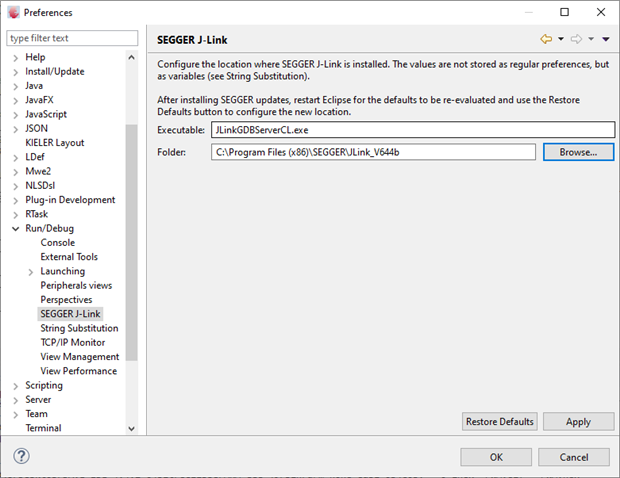
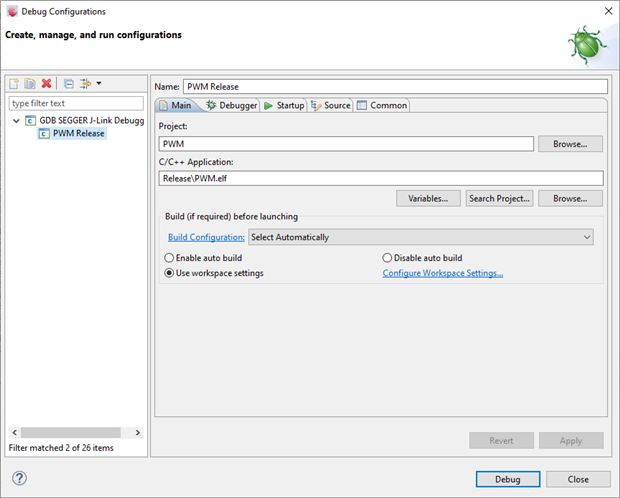
As I’m lacking in time, I won’t explore anything further with regards to the code, but I will get it onto the microcontroller so that I can get going with the RoadTest. To do this requires initialising the debugger. I had to check the path to the debugger in the preferences, ensure the project was built and then attempt to debug.
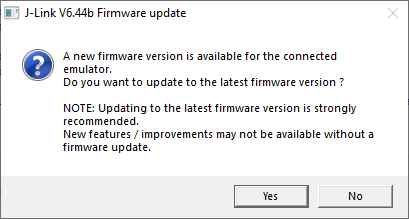
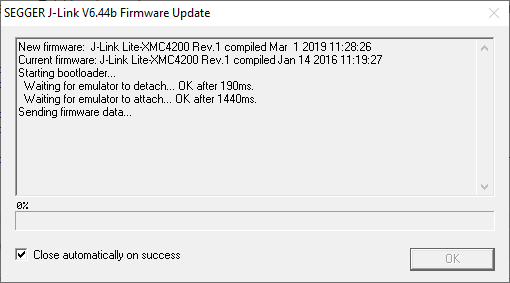
Surprisingly, the first attempt to program came up with a firmware update alert. If the dialog is not responded to quickly, the debug attempt will fail. Luckily I was able to select Yes the second time around and have the firmware updated and debug running.
Unfortunately, for some reason, the debugger didn’t seem to work correctly, but at least the programming was successful and the board is now generating both high-side and low-side signals as necessary.

Documentation
During the RoadTest, I had a thorough read of the documentation. On the whole, the datasheets for the driver and the MOSFET seemed well written, with the former being especially detailed and useful. The guide for the evaluation board, however, could do with some improvements with a number of broken cross-references, spelling and grammatical errors as well as misuse of gendered pronouns. Despite this, there is a wealth of information in the documentation – enough for interested parties to design with and demonstrate the board’s results without even having the board in their hands.
Conclusion
In order to get up and running with the board, the XMC2GO must be programmed and in order to achieve that, the Infineon DAVE Eclipse-based IDE is required. The setup is relatively easy, although at times can be a little less than intuitive, but for those who really just want to get moving with the evaluation board, they really only need it to program the board with the PWM program once and the board will retain it through power cycles.
The datasheets for the driver and the MOSFET are well written, detailed and useful. The guide for the evaluation board, however, could do with some improvements with a number of broken cross-references, spelling and grammatical errors. Despite this, there is enough information for interested parties to design with and demonstrate the board’s results without even having the board in their hands.
---
This is a part of the Infineon MOSFET Gate Driver IC Evaluation Board RoadTest featuring the EiceDRIVER 1EDN TDI (1EDN8550B)
Top Comments