


In May of this year I backed a Kickstarter campaign for the TinkerGen MARK: Make A Robot Kit, your hands on AI learning experience
TinkerGen is a spin-off from Seeed Studio that targets STEM education. This campaign is focused on bringing a mobile robot with artificial intelligence to STEM education. It seemed like a worthwhile endeavor and looked like a fun kit so I signed up. The kit is being manufactured by Seeed Studio so it didn't seem like there was much risk. The kits started shipping last month and I got mine last Monday. I'll probably take my time getting started and hopefully will have an enjoyable experience.

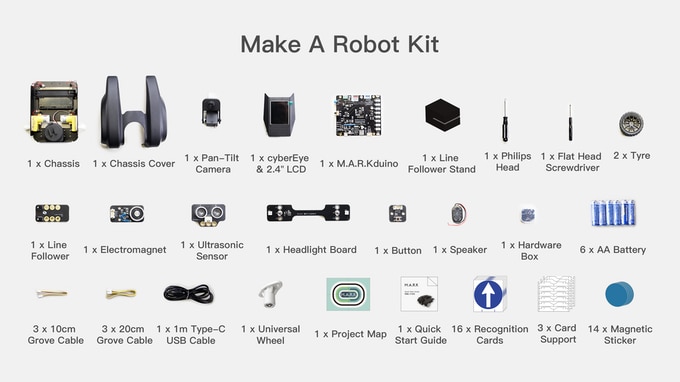
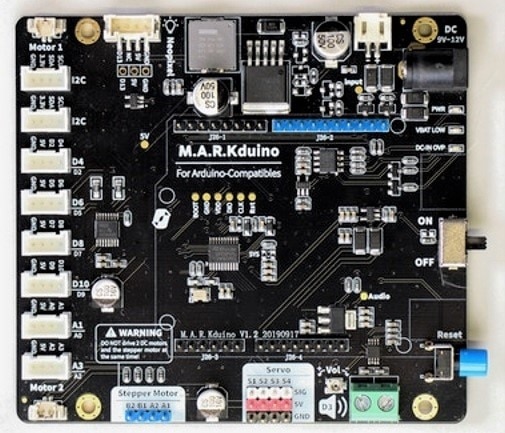
The kit is very well packaged and TinkerGen has provided a nice assembly video (but with a minor error that shows the Ultrasonic ranger plugged into an I2C socket). The kit uses a lot of existing electronics which is a smart idea. There is a new M.A.R.Kduino board which is an Arduino form factor "shield" that interfaces the CyberEye control board to the robot sensors and other electronics. The sensor interface uses the Grove format which makes configuration changes easy. There are two DC motor outputs to drive the right and left wheels and 4 servo outputs (2 are used for the camera pan/tilt). The board also has the power interface to use either the 6 AA battery pack or a 9-12V DC input.
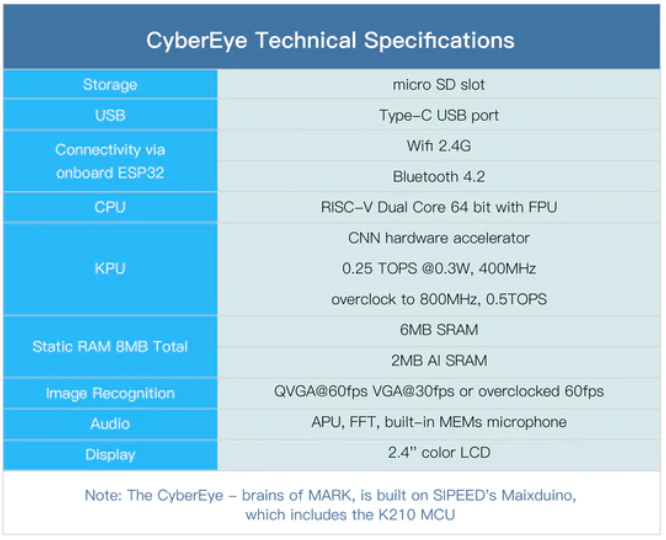
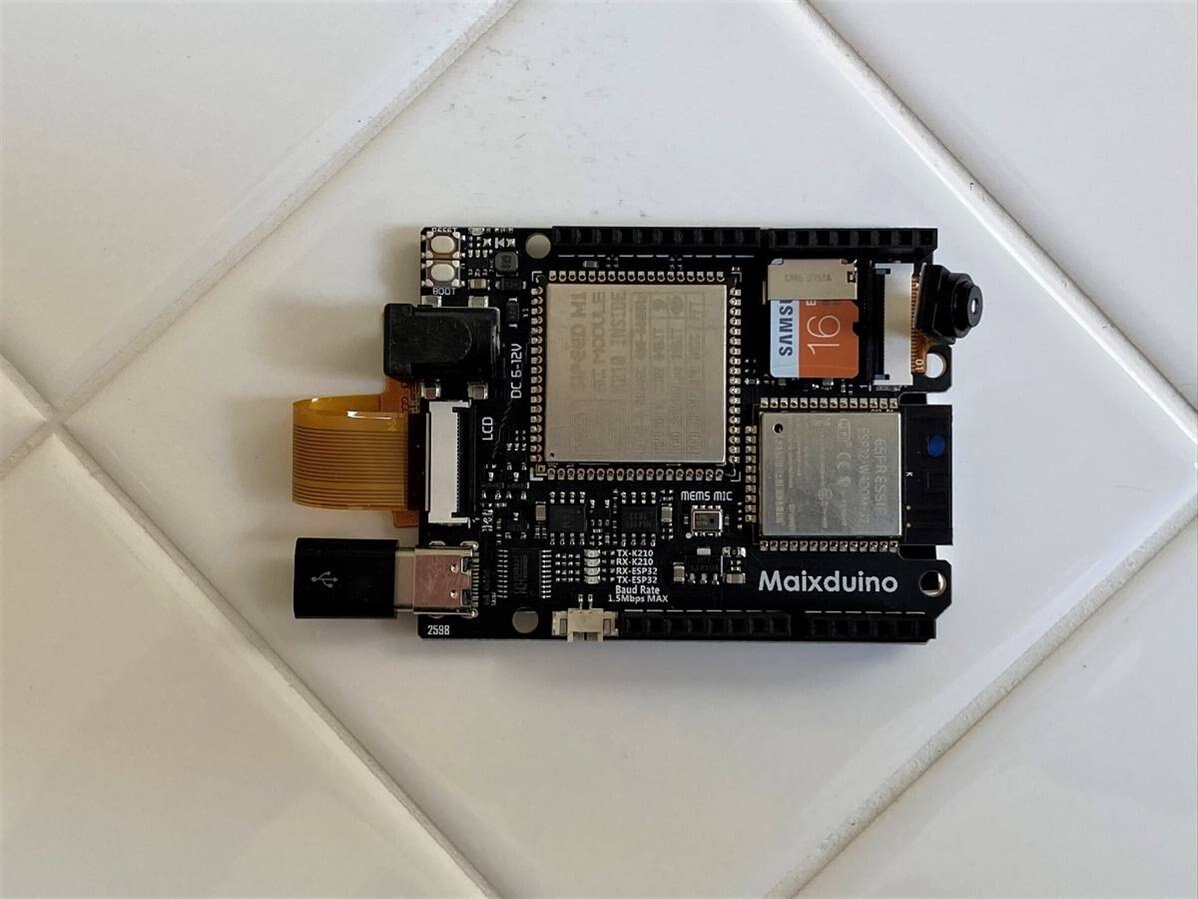
The main cyberEye control board looks to be just a re-branded Maixduino board that I've used before. The firmware is set up with MicroPython but I guess I could use the Arduino IDE if I wanted to modify any MaixDuino programs to run with the robot. For STEM it looks like they are using the Codecraft block programming language.
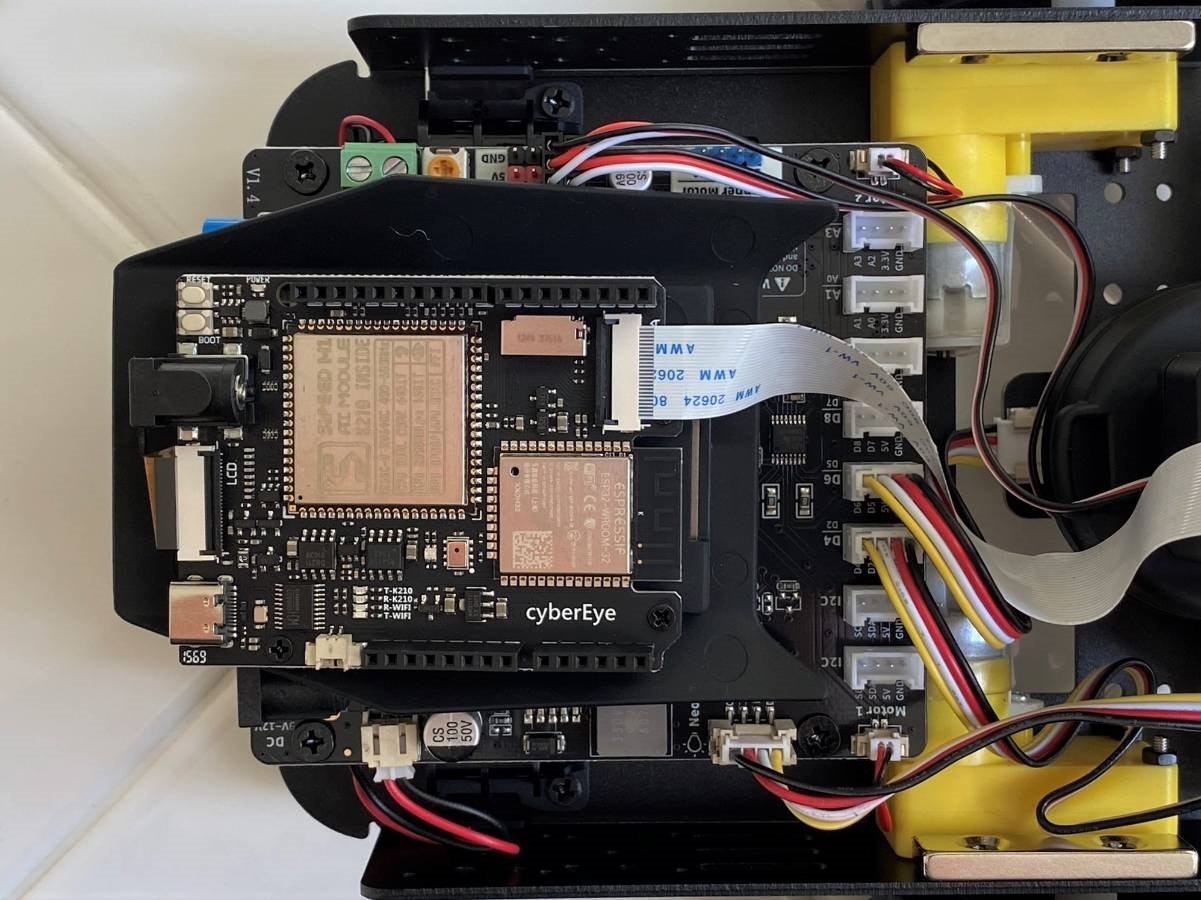
Assembly was straightforward. I've found Seeed Studio kits to be of good quality. The chassis is made of steel. Sort of reminds me of a 3 1/2" hard drive mounting bracket. The one area that I think that they could improve is the wheels and the pivot ball. This robot will probably only work well on smooth hard surfaces which is an okay trade-off for STEM, but I'll probably change it so that it runs okay on carpet and concrete.
There is a default program loaded into the robot but I haven't found a description of what it is supposed to do. It displays the camera image on the LCD and is doing image recognition. It is interesting that it can identify the STOP sign but it only slows down but does not stop. Also, the initialize sequence thrashes the pan/tilt assembly around almost to the point of damaging the cables!! I'm sure if I run this a few more times the flex data cable will get damaged. So, I won't run this program anymore  .
.
I'll post again after I played with it a bit and programmed it to do something useful.
Top Comments