


I trying to determine why the LED's on Pin 7 & 4 do not glow as bright as the pins on 5 & 2.
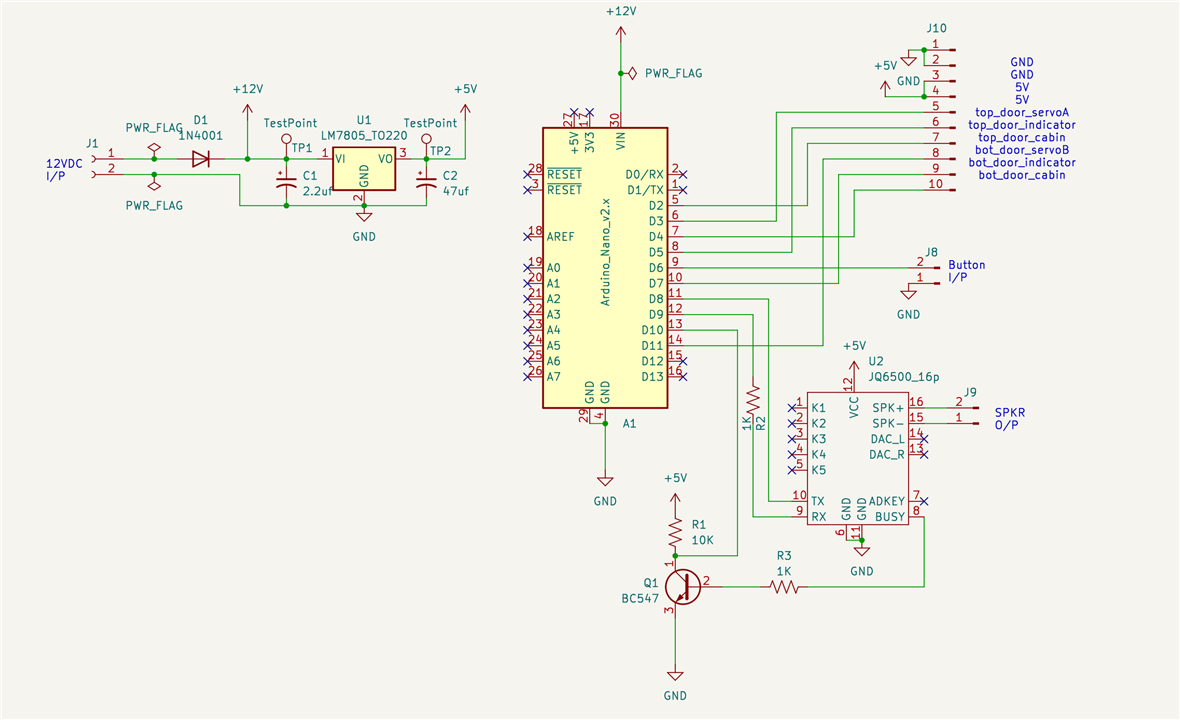
The nano circuit is for the two floor elevator project Going Down anyone . I've generated a PCB and during testing, the LED for the bottom floor do not glow as bright as the LED for the top floor. I don't recall this on the bread board but then again I was so excited about 3D printing the servo assembly and making the frame I didn't pay close attention.
I've done the first steps of checking components and found no differences. If I cycle the LED's using bare minimum code there is no brightness difference. If I run top elevator code and bottom independently in their own code as a single door they work. Combine them into the code I created and they glow dimmer.
#include <Arduino.h>
#include <Servo.h>
#include <SoftwareSerial.h>
#include <JQ6500_Serial.h>
uint8_t ServoA = 3;
uint8_t ServoB = 11;
int buttonPin = 6; // Button to trigger animation
int top_elevator_Status_LED = 5; // LEDs (via MOSFET) connected to pin 5
int top_elevator_Cabin_LED = 2; // LEDs (via MOSFET) connected to pin 5
int bot_elevator_Status_LED = 7; // LEDs (via MOSFET) connected to pin 5
int bot_elevator_Cabin_LED = 4; // LEDs (via MOSFET) connected to pin 5
int busyPin = 10; // JQ6500 BUSY connected to pin 10
int top_door_Open = 50;
int top_door_Closed = 87;
int bot_door_Open = 50;
int bot_door_Closed = 87;
float Ginc_value = .25; // increment value to control speed of servo at gate
int posA = 50; // variable to store the servo position
int posB = 50;
Servo servoA; //initialize servo
Servo servoB; //initialize servo
// Create the mp3 module object,
// Arduino Pin 8 is connected to TX of the JQ6500
// Arduino Pin 9 is connected to one end of a 1k resistor,
// the other end of the 1k resistor is connected to RX of the JQ6500
// If your Arduino is 3v3 powered, you can omit the 1k series resistor
SoftwareSerial mySerial(8, 9); //SoftwareSerial(rxPin, txPin) as seen from Arduino
JQ6500_Serial mp3(mySerial);
unsigned int numFiles; // Total number of files on media (autodetected in setup())
unsigned int pick; // what sound index file to play
byte mediaType; // Media type (autodetected in setup())
//debounce
int counter = 0;
int buttonState = 0;
int lastButtonState = 0;
int currentButtonState = 0;
unsigned long lastDebounceTime = 0;
unsigned long debounceDelay = 50;
void setup() {
pinMode(buttonPin, INPUT_PULLUP);
pinMode(top_elevator_Status_LED, OUTPUT);
pinMode(top_elevator_Cabin_LED, OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
servoA.attach(ServoA, 544, 2400);//600,2200
servoB.attach(ServoB, 544, 2400);
servoA.write(top_door_Closed); //default the servo before start
servoB.write(bot_door_Closed); //default the servo before start
mySerial.begin(9600);
while (numFiles == 0) {
mp3.reset();
mp3.setVolume(30);
mp3.setLoopMode(MP3_LOOP_NONE);
// Try to get the number of files on the SD Card
numFiles = mp3.countFiles(MP3_SRC_SDCARD);
if (numFiles) {
// If there are SD Card files, make sure we have selected that source
mp3.setSource(MP3_SRC_SDCARD);
mediaType = MP3_SRC_SDCARD;
} else {
// If none are found, the SD Card is not present or empty, so use
// the on board memory; Make sure we select the built in source
mp3.setSource(MP3_SRC_BUILTIN);
numFiles = mp3.countFiles(MP3_SRC_BUILTIN);
mediaType = MP3_SRC_BUILTIN;
}
if (!numFiles) {
Serial.println(F("Error! No files were found on the media, both SD Card and Built In memory were checked."));
Serial.println(F("We will try again in 3 seconds."));
Serial.println(F("If there are files there and we still can't find them, try turning everything off and on again, perhaps the module is confused."));
Serial.println(F("I think this might happen sometimes if you insert/remove an SD Card while powered up, but not totally sure!"));
Serial.println(F("In a real application, you might consider powering the JQ6500 module through a suitable MOSFET or BJT controlled from a pin so you can power-cycle the JQ6500 if it starts to act weird like this!"));
delay(3000);
}
}
// mitigate "pseudo random" by sampling the noise on analogue pin0 and use it as a value.
randomSeed(analogRead(A0));
}
void loop() {
currentButtonState = digitalRead(buttonPin);
if (currentButtonState != lastButtonState) {
lastDebounceTime = millis();
}
if ((millis() - lastDebounceTime) > debounceDelay) {
if (currentButtonState != buttonState) {
buttonState = currentButtonState;
if (buttonState == LOW) {
seq_top_Elevator();
delay(3000);
seq_bot_Elevator();
}
}
}
lastButtonState = currentButtonState;
}
void seq_top_Elevator()
{digitalWrite(LED_BUILTIN, HIGH); // turn the LED on
//trigger servo
digitalWrite(top_elevator_Cabin_LED, HIGH);
digitalWrite(top_elevator_Status_LED, HIGH); //trigger external LED (this may be mosfet driver)
delay(15);
mp3.playFileByIndexNumber(1);
for (posA = top_door_Closed; posA >= top_door_Open; posA -= 1) { // goes from 180 degrees to 0 degrees
servoA.write(posA); // tell servo to go to position in variable 'pos'
delay(15); // waits 15 ms for the servo to reach the position
}
delay(5000);
for (posA = top_door_Open; posA <= top_door_Closed; posA += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
servoA.write(posA); // tell servo to go to position in variable 'pos'
delay(15); // waits 15 ms for the servo to reach the position
}
digitalWrite(top_elevator_Status_LED, LOW);
digitalWrite(top_elevator_Cabin_LED, LOW);
// pick a random file, numbered 1 to numFiles (NB: random() returns up to but not including the highest number, hence why we add 1)
// if the file is the same as the one which was just played, pick a different one
if (digitalRead(busyPin) == LOW) {
}
//servoA.write(door_Closed);
digitalWrite(LED_BUILTIN, LOW); // turn the LED off
}
void seq_bot_Elevator()
{digitalWrite(LED_BUILTIN, HIGH); // turn the LED on
//trigger servo
digitalWrite(bot_elevator_Cabin_LED, HIGH);
digitalWrite(bot_elevator_Status_LED, HIGH); //trigger external LED (this may be mosfet driver)
delay(15);
mp3.playFileByIndexNumber(1);
for (posB = bot_door_Closed; posB >= bot_door_Open; posB -= 1) { // goes from 180 degrees to 0 degrees
servoB.write(posB); // tell servo to go to position in variable 'pos'
delay(15); // waits 15 ms for the servo to reach the position
}
delay(5000);
for (posB = bot_door_Open; posB <= bot_door_Closed; posB += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
servoB.write(posB); // tell servo to go to position in variable 'pos'
delay(15); // waits 15 ms for the servo to reach the position
}
digitalWrite(bot_elevator_Status_LED, LOW);
digitalWrite(bot_elevator_Cabin_LED, LOW);
// pick a random file, numbered 1 to numFiles (NB: random() returns up to but not including the highest number, hence why we add 1)
// if the file is the same as the one which was just played, pick a different one
if (digitalRead(busyPin) == LOW) {
}
//servoA.write(door_Closed);
digitalWrite(LED_BUILTIN, LOW); // turn the LED off
}
I'm taking the PCB to the shop to try adding a capacitor closer to the JQ6500 and the voltage output to the servo. Shabaz had recommended a capacitor for long runs the last time I had problems and it resolved them.
I confess I'm clutching here. The caps are for power that is not Nano related. LED's glowing dimmer is because of the Nano. I'm using a lot of pins. They are not on all at the same time to create an excessive load. I wish I was working to go for coffee with the tech folks. We would napkin out a solution for this in no time.
I was hoping some eyes on the circuit and code you might see "Oh yeah you failed to do this." Off to the shop to try the soldering iron.
Top Comments