What would you recommend to reduce the spurious triggers on the input of a Nano?
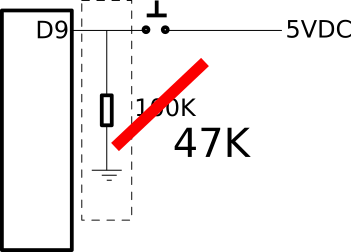
Up to now I have been using Arduino Nano microcontrollers for animation support on a model railroad without issue. With the recent completion of the airport scene, I started to experience issues of Nano's receiving spurious triggers. At first I thought maybe I set the input resistor to high, so I reduced the value from 100K to 47K. I got some relief but it has recently raised it ugly head again. Without the resistor the triggering is unpredictable.
Currently there are 5 animations that have button control.
- Aircraft landing simulation (LED)
- Hanger building Lighting (LED)
- Simulate arc welder at bench (LED)
- Compound gate open/close (28BYJ-48 ULN2003 controller)
- Hanger aircraft engine startup/shutdown (L293 brushless motor)
The compound gate sometimes triggers the Hanger aircraft engine animation and vise versa. The input circuit I am using for the Nano is minimal. These two animations did share the same twisted pair from the button panel. I have separated the animations button to different pairs and I have some relief. I'm thinking maybe there is a simple way to dampen inputs so they are not as sensitive?
I'm hoping someone might have a suggestion/best practice recommendation for connecting inputs, that is designed to eliminate the problem.