Hello Element14 community,
I have an amateur understanding of dc electronics but there are a few questions that i haven't found any other threads or discussions on. Probably because i do not know the name of the specific topic.
Forgive me if the answer is obvious, but my first question is on current placement. When i look at a solder less breadboard there are two lanes for a positive and negative voltage from a power supply. Say i have an 6v red led drawing 30ma from the power supply, but is connected to the power supply from the middle of the breadboards power lanes. Now if there is a 6v dc motor connected to the end of the power lanes and is drawing 1.5 amps or so, does the high current affect the led in front of the motor? again: there are 1.5 amps going across the power lanes to the motor at the end, but there is a small led drawing much less current before the motor from the same power source.
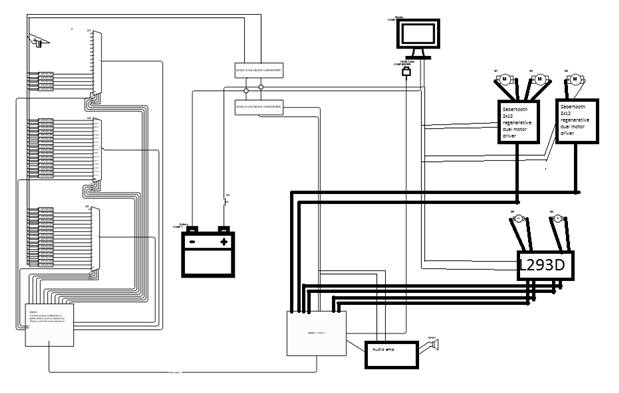
My second question is about capacitors. I have an array of Sharp (brand) Infrared distance sensors that operate at 5 volts and draw current in sharp bursts rated at around 30-60ma on average. I am planning on wiring all 37 of them to 3, 16 channel multiplexers connected to and Arduino uno that will then read the sensors analog output. (Multiplexer i will be using is the cd74hc4067). I have two questions on this topic, both of them about power connectivity. My first question is about the sensors. On a the sensors website and data sheet they both strongly recommend the use of some sort of capacitor to smooth things out. Please look at the picture attached and help me find the best places to add this extra circuitry. Please keep in mind that the S in the image is the Sharp infrared distance sensor and there are actually 37 sensors and not 3. Second is about the power it self. I was told that the sensor array would take little over 1.5 amps and to be safe i should have a power supply that can supply double the amount of current needed. The problem is that i don't actually need a power supply because i will be running this off a 12v lead acid battery. I'm not sure how to build a voltage regulator that can supply this amount of current (3 amps), if a voltage regulator is what i need. later I found this UBEC DC/DC Step-Down (Buck) Converter 5v @ 3a output on Adafruit but yet again i'm skeptical if it will properly power everything.
P.S. - Could a 12v 7aH lead acid battery (specifically this one: https://www.amazon.com/ExpertPower-EXP1270-Rechargeable-Lead-Battery/dp/B003S1RQ2S/ref=sr_1_3?ie=UTF8&qid=1468962932&sr=… )
power this arduino sensor array? Specifically how much am i able to draw from this battery? In the future i plan on building a large robot and i need a battery that will be able to power this sensor array, 3 sub 100watt 24v DC motors, 2 small 24v DC gear motors,a raspberry pi 2b and a 12v dc VGA monitor. I know its allot but they all wont be running at once (mainly the motors) and i also know that i can increase the battery capacity by wiring two or more together in parallel (please correct me if i'm wrong). I'm just asking if this lead acid battery type can discharge the required amount of power with out any battery problems, i don't what any battery fires or an explosion.
Please write me back and helpful links or answers to my questions!
Thank you for your time!
 |