

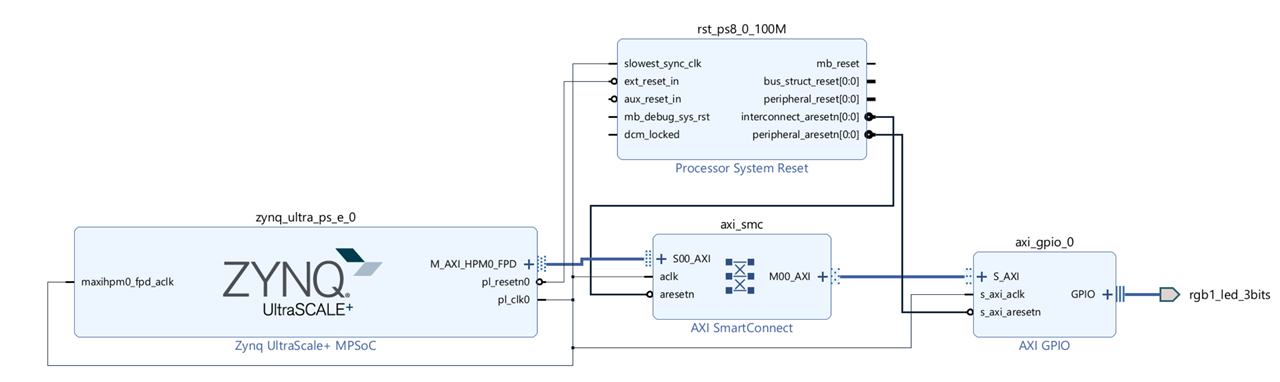
I've setup a minimal project in Vivado, basically I only have the a GPIO block connected to one of the RGB LEDs on the board:
Next, I tried modifying an example code so I can toggle the LED, but once I execute a command that tried reading or writing to the PL side (AXI?) the debugging halts and I must stop debugging to reset the system. The hardware export from Vivado includes the bit file.
Here is the code that I'm running, it will hang on: XGpio_SetDataDirection(&Gpio, 1, 0);
I'll appreciate it greatly if anyone could point out what's wrong here. I'm using the latest Vivado & Vitis.
#include "xparameters.h"
#include "xgpio.h"
#include "xstatus.h"
#include "xplatform_info.h"
#include <xil_io.h>
#include <xil_printf.h>
#define XGPIOPS_BASEADDR XPAR_XGPIO_0_BASEADDR
#define LED_DELAY 10000000
#define LED_MAX_BLINK 0x10 /* Number of times the LED Blinks */
#define printf xil_printf /* Smalller foot-print printf */
static int GpioOutputExample(void);
static int GpioInputExample(u32 *DataRead);
#ifndef SDT
int GpioPolledExample(u16 DeviceId, u32 *DataRead);
#else
int GpioPolledExample(UINTPTR BaseAddress, u32 *DataRead);
#endif
static u32 Input_Pin; /* Switch button */
static u32 Output_Pin; /* LED button */
XGpio Gpio; /* The driver instance for GPIO Device. */
/*****************************************************************************/
/**
*
* Main function to call the example.
*
*
* @return
* - XST_SUCCESS if the example has completed successfully.
* - XST_FAILURE if the example has failed.
*
* @note None
*
******************************************************************************/
int main(void)
{
int Status;
u32 InputData;
printf("GPIO Polled Mode Example Test \r\n");
#ifndef SDT
Status = GpioPolledExample(GPIO_DEVICE_ID, &InputData);
#else
Status = GpioPolledExample(XGPIOPS_BASEADDR, &InputData);
#endif
if (Status != XST_SUCCESS) {
printf("GPIO Polled Mode Example Test Failed\r\n");
return XST_FAILURE;
}
printf("Data read from GPIO Input is 0x%x \n\r", (int)InputData);
printf("Successfully ran GPIO Polled Mode Example Test\r\n");
return XST_SUCCESS;
}
/*****************************************************************************/
/**
*
* The purpose of this function is to illustrate how to use the GPIO driver to
* turn on/off an LED and read the inputs using the pin APIs.
*
* @param DeviceId is the XPAR_<GPIO_instance>_DEVICE_ID value from
* xparameters.h
* @param DataRead is the pointer where the data read from GPIO Input is
* returned.
*
* @return
* - XST_SUCCESS if the example has completed successfully.
* - XST_FAILURE if the example has failed.
*
* @note This function will not return if the test is running.
*
******************************************************************************/
#ifndef SDT
int GpioPolledExample(u16 DeviceId, u32 *DataRead)
#else
int GpioPolledExample(UINTPTR BaseAddress, u32 *DataRead)
#endif
{
int Status;
XGpio_Config *ConfigPtr;
int Type_of_board;
/* Initialize the GPIO driver. */
#ifndef SDT
//ConfigPtr = XGpio_LookupConfig(GPIO_DEVICE_ID);
#else
ConfigPtr = XGpio_LookupConfig(BaseAddress);
#endif
Type_of_board = XGetPlatform_Info();
switch (Type_of_board) {
case XPLAT_ZYNQ_ULTRA_MP:
Input_Pin = 1;
Output_Pin = 0;
break;
case XPLAT_ZYNQ:
Input_Pin = 14;
Output_Pin = 10;
break;
#ifdef versal
case XPLAT_VERSAL:
/* Accessing PMC GPIO by setting field to 1 */
Gpio.PmcGpio = 1;
Input_Pin = 56;
Output_Pin = 52;
break;
#endif
}
Status = XGpio_CfgInitialize(&Gpio, ConfigPtr,
ConfigPtr->BaseAddress);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
Status = XGpio_Initialize(&Gpio, XPAR_XGPIO_0_BASEADDR);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
/* Run the Output Example. */
Status = GpioOutputExample();
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
return XST_SUCCESS;
}
/*****************************************************************************/
/**
*
* This function does a minimal test on the GPIO device configured as OUTPUT.
*
* @param None.
*
* @return - XST_SUCCESS if the example has completed successfully.
* - XST_FAILURE if the example has failed.
*
* @note None.
*
****************************************************************************/
static int GpioOutputExample(void)
{
u32 Data;
volatile int Delay;
u32 LedLoop;
/*
* Set the direction for the pin to be output and
* Enable the Output enable for the LED Pin.
*/
XGpio_SetDataDirection(&Gpio, 1, 0);
/* Set the GPIO output to be low. */
XGpio_DiscreteWrite(&Gpio, 1, 0);
for (LedLoop = 0; LedLoop < LED_MAX_BLINK; LedLoop ++) {
#ifndef __SIM__
/* Wait a small amount of time so the LED is visible. */
for (Delay = 0; Delay < LED_DELAY; Delay++);
#endif
/* Set the GPIO Output to High. */
XGpio_DiscreteWrite(&Gpio, 1, 0b111);
/*
* Read the state of the data and verify. If the data
* read back is not the same as the data written then
* return FAILURE.
*/
#ifndef __SIM__
/* Wait a small amount of time so the LED is visible. */
for (Delay = 0; Delay < LED_DELAY; Delay++);
#endif
/* Clear the GPIO Output. */
XGpio_DiscreteWrite(&Gpio, 1, 0);
/*
* Read the state of the data and verify. If the data
* read back is not the same as the data written then
* return FAILURE.
*/
}
return XST_SUCCESS;
}