

Description:
This sensor board is aimed at addressing the sensing needs of a driver assistance system, for automated/ semi-automated drive systems.
Such systems typically need to sense a lot of things around and in the car such as presence of obstacle, speed of car, yaw, pitch etc.
Today, cameras are used extensively in the Automated Driving (AD) community for capturing information about external obstacles. Hence, I have included a camera in this board.
The application would decide upon how many images to use per second, the camera produces a maximum of 30 Frames Per Second (FPS).
Input from the camera can typically be processed using a neural network of other computer vision applications to detect and locate objects such as cars, pedestrians.
Once objects have been detected, the path planning is done and the drive train is actuated accordingly.
For this to happen, the present state of the car's motion is estimated using some common inputs such as - speed, acceleration, yaw, angle.
For this, the 3-axis gyroscope and accelerometer are used.
The proximity sensor is used to detect very close objects, mostly at low speeds.
Considering the large amount of data produced by the camera and other sensors, Ethernet is chosen as a suitable communication interface, along with I2C.
Suggested improvement:
Since we have data coming from several sensors, it would be nice if we can have a single micro-controller on the sensor board, that collects data from all sensors and sends it out to the application controller.
Similarly, calibration data from application controller can be sent only to the sensor controller which then channels it to the individual sensors.
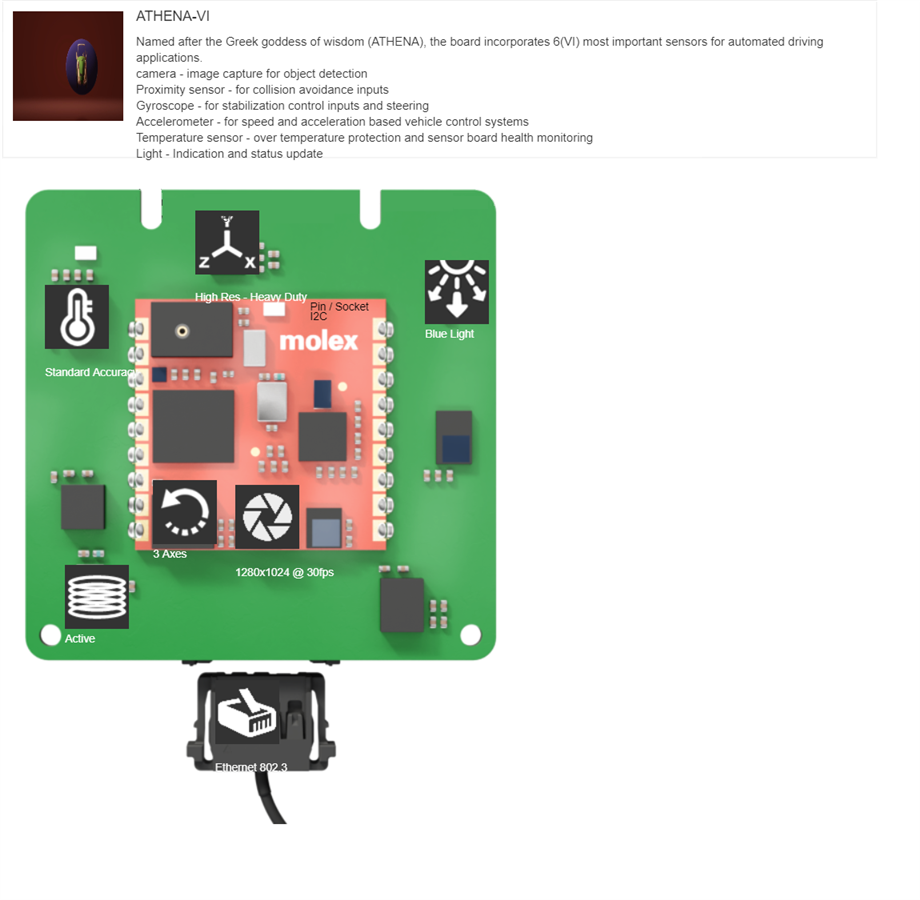
Parts List
| Component Type | Component Name | Description | Quantity | |
|---|---|---|---|---|
| BUS / Interface | I2C | Inter-Integrated Circuit Communications Protocol | 1 | |
| Direct Attach Type | Pin / Socket | Pin or Socket sensorboard connector | 1 | |
| Hardwired Type | Ethernet 802.3 | IEEE 802.3 Local Area Network | 1 | |
| Gyroscope | 3 Axes | 3 Axes - Eg. Pitch / Yaw / Rotation | 1 | |
| Camera | 1280x1024 @ 30fps | Streaming Video (30 fps) + Standard Definition (1280 x 1024) | 1 | |
| Accelerometer | High Res - Heavy Duty | High Resolution (16 bit) + Heavy Duty (± 90.0 G) | 1 | |
| Colour | Blue Light | 450-495 nm | 1 | |
| Proximity | Active | Active Sensing | 1 | |
| Temperature | Standard Accuracy | Standard Accuracy (±2°C) from -40°C to 105°C | 1 |