


1. Parts List
| Component Type | Component Name | Description | Quantity | |
|---|---|---|---|---|
| BUS / Interface | I2C | Inter-Integrated Circuit Communications Protocol | 1 | |
| Direct Attach Type | SMD | Surface Mount Device Connection Type | 1 | |
| Wireless Technology | Zigbee | Zigbee 802.15.4 | 1 | |
| Pressure | 24bit-126kPA +/- 1% | High Resolution (24 bit) + High Pressure (126 kPa) + Standard Accuracy (± 1.0%) | 1 | |
| Magnetometer | 12-bit | Medium Resolution (12 bit) | 1 | |
| Gyroscope | 3 Axes | 3 Axes - Eg. Pitch / Yaw / Rotation | 1 | |
| Camera | 1920x1080 @ 30fps | Streaming Video (30 fps) + Hi-Definition (1920 x 1080) | 1 | |
| Accelerometer | Medium Res - Heavy Duty | Medium Resolution (12 bit) + Heavy Duty (± 90.0 G) | 1 | |
| Humidity | Standard Accuracy | Standard Accuracy (± 5.0%) from 0 to 100% RH | 1 | |
| Light | Visible Spectrum | Visible spectrum (peak wavelength 750nm) | 1 | |
| Temperature | High Accuracy | High Accuracy (±0.5°C) from -40°C to 105°C | 1 |
2. Introduction
Flying sensorboard is designed to be fixed on flying objects to sensing movements, remote visual, and remote environment.
The most fascinating part of this board is the application on Swarm Flying objects, such a flock of birds, when Zigbee is configurated as Mesh Grid in adHoc state. That means each bird can join or leave the moving Zigbee Mesh freely. In open air, 2.4GHz Zigbee can provide reliable links ranging 100 meters.
There are three groups of sensors on this flying sensor board,
Movement sensors:
- Magnetometer
- Gyroscope 3 Axes
- Accelerometer Medium Res - Heavy Duty Medium Resolution (12 bit)
Environment sensors:
- Temperature
- Pressure-24bit-126kPA
- Humidity- 0 to 100% R
- Light -Visible Spectrum (peak wavelength 750nm)
Visual sensors:
- Camera 1920x1080 @ 30fps Streaming Video (30 fps)
One I2C bus is provided for further extension for more sensors.
3. Description of Sensors
Flying sensorboard is designed to be fixed on flying objects to sensing movements.
- Pressure High Resolution (24 bit) + High Pressure (126 kPa) + Standard Accuracy (± 1.0%) for altitude sensing
- Magnetometer Medium Resolution (12 bit) for magnetic direction in navigation
- Gyroscope 3 Axes - Eg. Pitch / Yaw / Rotation for movement sensing
- Camera Streaming Video (30 fps) + Hi-Definition (1920 x 1080) for visual imaging
- Accelerometer Medium Resolution (12 bit) + Heavy Duty (± 90.0 G) for movement sensing
- Humidity Standard Accuracy (± 5.0%) from 0 to 100% RH for environment index sensing
- Light Visible spectrum (peak wavelength 750nm) for environment index sensing
- Temperature High Accuracy (±0.5°C) from -40°C to 105°C for environment index sensing
4. Description to Interface
There are two interface in this sensor board,
- Hardwire I2C bus interface bus,
With standard 100 kbit per second and 400 kbit fastmode or high speed 3.4 Mbit option , I2C is not only used on single boards but also to connect components which are linked via cable. Simplicity and flexibility are key characteristics that make this bus attractive to many applications. I2C is a true multi-master bus providing arbitration and collision detection.

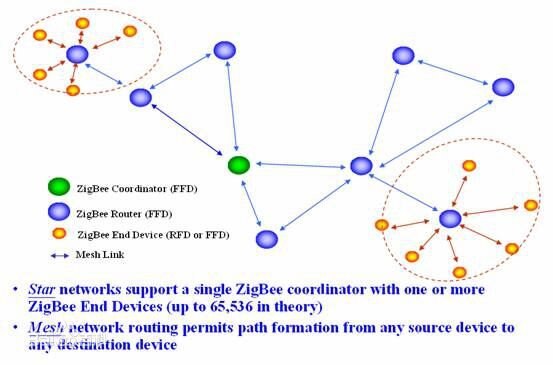
- wireless Zigbee
Principle of Zigbee can be shown below as reference, this robust protocle makes the board fly with birds.
5. Application of Flying Sensor Boards
There are multiple operation mode for this flying sensor board, single board mode, moving single board mode, swarm mode, moving swarm mode.
- single board mode The board can be used for weather station
- moving single board mode The board can be used for self-balance scooter or pet-tracer
- swarm mode The board can be use for remote asset supervision like animal farm or oil pipeline
- moving swarm mode This application in flying bird migration, swarm drone control.
6. Further Work and Improvement Shall Be Done
The power consumtion shall be optimized for long duration.
The biggest challenge is for moving swarm mode. How The sensor data be linked to ground base station need more robust design and verification.