


| Visit our Halloween space and find out how to win one of two Cel Robox 3D Printers. There are two ways to win:
| Share your Project and Win |
| #ShareTheScare Competition | ||
| The Ben Heck Show Episodes |

by LDR (age 10) and Thermistor (age 8)



Last Halloween we saw a brilliant Dalek pumpkin in a Cambridge college quad. It had a candle in and looked sinister but funny at the same time. We decided to make one ourselves this year (Halloween and Doctor Who are big on our street).
For Christmas, we got our first Pi (thank you @drlucyrogers) , loaded with NodeRed. We did the traffic lights and a game, so we got ambitious. We were going to make an operational NodeRed pumpkin Dalek (not fully operational - that would be terrifying).
Choosing the Materials
Eye stalk and LED: We used a clear plastic pen for the stalk, with a blue LED, and a transparent lid on the end. We used card circles for the rings.
Ears: We used two transparent, plastic measuring-cups with red LEDs for the ears.
Main body bumps: The Cambridge pumpkin Dalek used plastic shot-glasses to light up. We needed something smaller and found plastic test-tubes on the web.
Gun and sucker: Sadly, our home plunger was too big. However, the whisk was perfect. We used a black lid and metal rod instead of the plunger.
Carving, Drilling and Testing




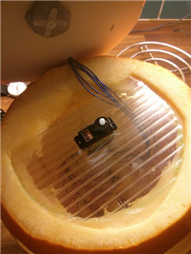

We cut off the top and scooped the seeds out. I imagine this part is similar to a real Dalek. We drilled holes for the wires to pass into the Dalek for the eye stalk and two ears. The stalk and ears push into the pumpkin flesh. Then we drilled twelve holes for the test-tubes and pushed them through. We also cut vents and an access hatch at the back.
Testing the LEDs
We soldered the yellow LEDs onto wires to hold them in place. They sit in the test tubes.
Testing the Servo
We used a separate power supply to power the servo. It took us ages to work out that we needed to join the negative terminal to the ground on the Pi! Once there, it also took us time to work out the slightly strange PWM on NodeRed - sending a "5" to the PWM output made it turn left 90 degrees - sending "15" made it turn right. Higher numbers just make the servo keep turning.
After much experimenting, we found some transparent plastic in the shed. We used this to fix the servo to the main body. We used wire staples to fix the servo rotor to the head.
Testing the PIR
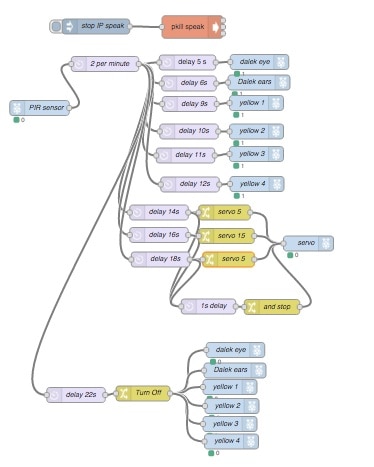
We wanted to use a sensor to start the Dalek boot-up sequence automatically. The PIR worked very well connected to the same power supply as the servo (5V). We limited the number of messages to one per minute to prevent multiple signals travelling through the flow.
Writing the Flow
It took some time setting up the GPIO elements. Once these were done, LDR and Thermistor were skilled at sequencing adding delays and resetting at the end.
Sound
Sorting the sound took a bit of time. We found a kid's mini speaker with satisfyingly low sound quality. Works a treat. We downloaded various sfx mp3 files and transferred them across via terminal to the .node-red folder on the pi. Finally we made a new flow element by pasting this code into node-red:
[{"id":"65872231.9a78dc","type":"exec","command":"mplayer -really-quiet /home/pi/.node-red/dalek.mp3","addpay":false,"append":"","useSpawn":"","name":"EXTERMINATE!","x":1316.8081817626953,"y":245.25010299682617,"z":"ebd21660.142de8","wires":[[],[],[]]}]
We repeated this for a cool sfx boot up mp3 and robot shut down mp3 and added these to the flow. Sounds great.
Terrifying Small Children
Today is the 30th October. We will be tweeting the results tomorrow!
@BenRogersEdu
