RoadTest: Trinamic TMCM-0960-MotionPy SBC + Stepper Motor
Author: MARK2011
Creation date:
Evaluation Type: Development Boards & Tools
Did you receive all parts the manufacturer stated would be included in the package?: True
What other parts do you consider comparable to this product?: Concerning the TMCM board - most comparable seems to be popular PY-Boards. Also Infineons Stepper Motor Control Shield should be mentioned (e.g. FX9201 and XMC1300 as well as Ti products with their popular motor drivers. The smart motor module in my opinion has no competitors. Of course if we split it just the engine can be compared with many NEMA steppers but the idea of PANdrive is extraordinary.
What were the biggest problems encountered?: I must honestly confess I missed more detailed instructions of setup and initial preparation of the set. Documentation is still in development and some codes wers outdated when I started to lern it. There is also question of the reliable support. As finally I was instructed by top specialist in the topic, the beginning was truly worse.
Detailed Review:
The roadtest I have the honour to conduct concerns the set of the TMCM-0960-MotionPy board and PD42-1270 stepper motor.
Both came from Trinamic, now the part of Maxim Integrated.
I ‘m ashamed to start my report by complaining about the TMCM-0960-MotionPy. But I want to tell about that misunderstanding at the beginning.
The board is defined as the open-source single board computer running MicroPython. I must honestly disagree
as my understanding of single board computers differs very much. TMCM-0960 is in truth the kind of development board
with the STM32F405RGT6 as the “heart” or “brain”. It is very close to the idea of popular PYBoards.
That made some consternation as we can’t run any OS on that system. Only limited FV dedicated to that board.
Nevertheless, the Arm Cortex-M4 core is still an interesting option and the simple and easy to operate system
based on micropython lets us spread the scope of application for the TMCM-0960.
Unboxing was very pleasant reward for relative long waiting for customs procedures completion.
TMCM-0960 board; PD42-1270 stepper motor; adapter board with plugs; 32G SD Card and USB type C cable.
All fine and secure packed.
The “smell” of fresh electronic - as always - unforgotten.
The kit is well documented and comes with clear description on TRINAMIC site there are also links to related github repositories
as well as some fine video on YT (I love watching presentations with TMCL-IDE graphs - especially live waveform is great)
TMCM-0960-MotionPy resources are simply available at
https://www.trinamic.com/products/modules/details/tmcm-0960-motionpy/
The most convenient document is TMCM-0960-MotionPy_HW_Manual_V10 (6).pdf
MicroPython SBC for Test, Dev, and Lab Automation MICROPYTHON SBC
Document Revision V1.00 • 2020-10-23
There is no need to repeat details and features of that board.
Things worth to emphasize: big range of motor supply voltage (6..50V)
many interfaces:UART as well as USB, CAN, RS485, SPI
The board employes STM32F405RGT6 controller
https://www.st.com/en/microcontrollers-microprocessors/stm32f405rg.html
Arm Cortex-M4 core with DSP and FPU, 1 Mbyte of Flash memory, 168 MHz CPU, ART Accelerator
The STM32F405xx and STM32F407xx family is based on the high-performance Arm® Cortex®-M4 32-bit RISC core operating at a frequency of up to 168 MHz.
The Cortex-M4 core features a Floating point unit (FPU) single precision which supports all Arm single-precision data-processing instructions and data types.
It also implements a full set of DSP instructions and a memory protection unit (MPU) which enhances application security.
The STM32F405xx and STM32F407xx family incorporates high-speed embedded memories (Flash memory up to 1 Mbyte, up to 192 Kbytes of SRAM),
up to 4 Kbytes of backup SRAM, and an extensive range of enhanced I/Os and peripherals connected to two APB buses, three AHB buses and a 32-bit multi-AHB bus matrix.
All devices offer three 12-bit ADCs, two DACs, a low-power RTC, twelve general-purpose 16-bit timers including two PWM timers for motor control, two general-purpose 32-bit timers.
True random number generator (RNG). They also feature standard and advanced communication interfaces.
PD42-1270 PANdrive smart stepper motor
https://www.trinamic.com/products/drives/details/pd42-x-1270/
Regarding the motor, the main paper is PD42-1270 Hardware Manual
PD-1270_hardware_manual_hw1.00_rev1.11_01 (1).pdf
I found very useful: TMCL Reference and Programming Manual (TMCL_reference_2015.pdf)
Trinamic Motion Control Language (TMCL)
PD42-1270 belongs to the family of PANdrive™ smart stepper motors. The control module is interfaced with the MCU board via CAN bus
It is normal stepper motor
with CANbus interface board together with motion controller.
main parameters:
Supply Voltage +24V nom. (+6V to +28VDC) and 1.0A RMS phase current.
Interesting features of the unit are:
StealthChop for absolute silent motor control in PWM mode,
SpreadCycle smart mixed decay for high speed stepper motor commutation,
SixPoint motion ramps - fully integrated hardware motion controller,
StallGuard2 load detection
CoolStep for automatic current scaling
The smart motor employes TMCL or CANopen protocol - in my case the TMCL firmware was used.
PANdrive concept:
https://www.trinamic.com/products/pandrive-smart-motors/
PANdrive™ smart motors are compact drives complete with all the components you need. The module mounted on the back of the motor
offers an onboard TMCL mini-PLC for standalone operation, which can be easily programmed with the free TMCL-IDE software.
Various standard interfaces are supported and combined with Trinamic's industry-leading feature set. Together with the built-in SensOstep™ encoder,
PANdrive smart motors are the perfect solution for easily scalable systems.
Regarding multimedia, mentioned above very useful youtube films:
How to use graphs within the TMCL-IDE https://www.youtube.com/watch?v=DLRblB8DZ7k
Trinamic's Swiss Army Knife for Engineers Running MicroPython https://www.youtube.com/watch?v=UcnQzKeuleA
Software projects, examples and all necessary repositories are available on Github: https://github.com/trinamic/PyTrinamicMicro .
Trinamic Motion Control site on FB https://www.facebook.com/Trinamic.MC/
I think I studied above materials quite thoroughly
with one remark - I couldn’t find the explanation of the mysterious sentence from the papers:
“module offers a total of 13 functions in Python programming language”
The family of TMCM boards as well as PANdrive motors is fully supported with convenient software:
https://www.trinamic.com/support/software/tmcl-ide/#c414
TMCL - IDE is the short for Trinamic Motion Control Language - Integrated Development Environment.
The TMCL-IDE is an integrated development environment made for developing applications using Trinamic modules and chips.
The graphical user interface provides tools for setting parameters, visualizing data in real-time, and for developing and debugging stand-alone applications.
The program is perfect solution to quickly set, check and tune motor parameters and features. Is perfect for evaluation purpose.
Moreover - Using the TMCL Creator it is possible to develop stand-alone TMCL programs. These programs can be downloaded to a module and then run on the module.
https://www.trinamic.com/fileadmin/assets/toolkit/TMCL-IDE_User_manual.pdf
https://www.247motioncontrol.com/media/1271/tmcl-ide_usermanual_v201.pdf
Apart from documentation, manuals, tutorials and examples, a very important part for developers are support resources and user foras.
In our case the official Trinamic Support is now directing you to the common Maxim Integrated support.
https://www.trinamic.com/support/technical-support/
https://maximsupport.microsoftcrmportals.com/en-US/tech-support/
TMCM-0960 board driver installation sequence.
After inserting to the USB port it was quickly recognized as PYBFLASH.
The board is also available as the storage device (of very small capacity, less 100MB in fact), the possibility of extending the space using an SD card is very convenient.
But we need to remember that native storage will be inaccessible when using the SD.
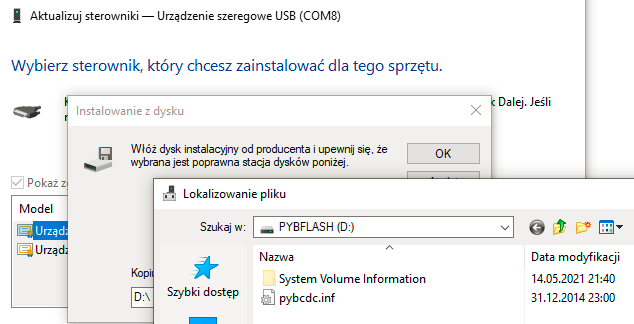
Unfortunately I realized soon that my system recognized the drivers improperly.
It was inaccessible in the clients terminal shell.
First I tried to reinstall drivers
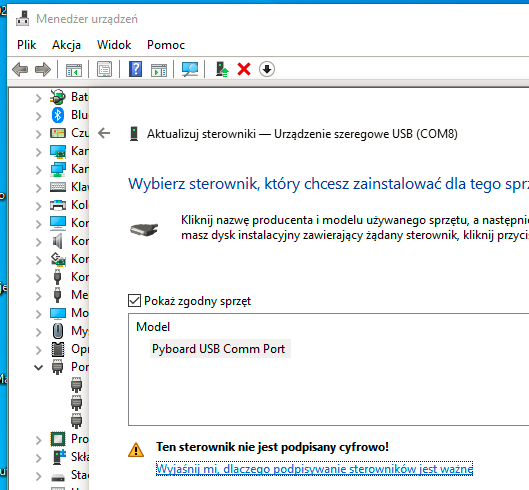
But then I discovered that the driver signing issue arose
the driver is not digitally signed
Since the driver is not digitally signed, Windows may prevent you completely from
proceeding with the installation.
I had to go to the test mode to install Unsigned Drivers in Windows 10
https://www.maketecheasier.com/install-unsigned-drivers-windows10/
Base contents of the board storage folder
README.txt
This is a MicroPython board
You can get started right away by writing your Python code in 'main.py'.
For a serial prompt:
- Windows: you need to go to 'Device manager', right click on the unknown device,
then update the driver software, using the 'pybcdc.inf' file found on this drive.
Then use a terminal program like Hyperterminal or putty.
- Mac OS X: use the command: screen /dev/tty.usbmodem*
- Linux: use the command: screen /dev/ttyACM0
Please visit http://micropython.org/help/ for further help.
key = USB_VID val = f055
key = USB_PID_CDC_MSC val = 9800
key = USB_PID_CDC_HID val = 9801
key = USB_PID_CDC val = 9802
key = USB_PID_MSC val = 9803
key = USB_PID_CDC2_MSC val = 9804
key = USB_PID_CDC2 val = 9805
key = USB_PID_CDC3 val = 9806
key = USB_PID_CDC3_MSC val = 9807
key = USB_PID_CDC_MSC_HID val = 9808
key = USB_PID_CDC2_MSC_HID val = 9809
key = USB_PID_CDC3_MSC_HID val = 980a
; Windows USB CDC ACM Setup File
; Based on INF files which were:
; Copyright (c) 2000 Microsoft Corporation
; Copyright (C) 2007 Microchip Technology Inc.
; Likely to be covered by the MLPL as found at:
; <http://msdn.microsoft.com/en-us/cc300389.aspx#MLPL>.
[Version]
Signature="$Windows NT$"
Class=Ports
ClassGuid={4D36E978-E325-11CE-BFC1-08002BE10318}
Provider=%MFGNAME%
LayoutFile=layout.inf
DriverVer=03/11/2010,5.1.2600.3
[Manufacturer]
%MFGNAME%=DeviceList, NTamd64
[DestinationDirs]
DefaultDestDir=12
;---------------------------------------------------------------------
; Windows 2000/XP/Server2003/Vista/Server2008/7 - 32bit Sections
[DriverInstall.nt]
include=mdmcpq.inf
CopyFiles=DriverCopyFiles.nt
AddReg=DriverInstall.nt.AddReg
[DriverCopyFiles.nt]
usbser.sys,,,0x20
[DriverInstall.nt.AddReg]
HKR,,DevLoader,,*ntkern
HKR,,NTMPDriver,,usbser.sys
HKR,,EnumPropPages32,,"MsPorts.dll,SerialPortPropPageProvider"
[DriverInstall.nt.Services]
AddService=usbser, 0x00000002, DriverService.nt
[DriverService.nt]
DisplayName=%SERVICE%
ServiceType=1
StartType=3
ErrorControl=1
ServiceBinary=%12%\usbser.sys
;---------------------------------------------------------------------
; Windows XP/Server2003/Vista/Server2008/7 - 64bit Sections
[DriverInstall.NTamd64]
include=mdmcpq.inf
CopyFiles=DriverCopyFiles.NTamd64
AddReg=DriverInstall.NTamd64.AddReg
[DriverCopyFiles.NTamd64]
usbser.sys,,,0x20
[DriverInstall.NTamd64.AddReg]
HKR,,DevLoader,,*ntkern
HKR,,NTMPDriver,,usbser.sys
HKR,,EnumPropPages32,,"MsPorts.dll,SerialPortPropPageProvider"
[DriverInstall.NTamd64.Services]
AddService=usbser, 0x00000002, DriverService.NTamd64
[DriverService.NTamd64]
DisplayName=%SERVICE%
ServiceType=1
StartType=3
ErrorControl=1
ServiceBinary=%12%\usbser.sys
;---------------------------------------------------------------------
; Vendor and Product ID Definitions
[SourceDisksFiles]
[SourceDisksNames]
[DeviceList]
%DESCRIPTION%=DriverInstall, USB\VID_f055&PID_9800&MI_00, USB\VID_f055&PID_9800&MI_01, USB\VID_f055&PID_9801&MI_00, USB\VID_f055&PID_9801&MI_01, USB\VID_f055&PID_9802
[DeviceList.NTamd64]
%DESCRIPTION%=DriverInstall, USB\VID_f055&PID_9800&MI_00, USB\VID_f055&PID_9800&MI_01, USB\VID_f055&PID_9801&MI_00, USB\VID_f055&PID_9801&MI_01, USB\VID_f055&PID_9802
;---------------------------------------------------------------------
; String Definitions
[Strings]
MFGFILENAME="pybcdc"
MFGNAME="MicroPython"
DESCRIPTION="Pyboard USB Comm Port"
SERVICE="USB Serial Driver"
After fixing problem with the driver, the board is fully accessible. Any client can be used, I like puTTY
the board comes with following message:
MicroPython v1.13-96-g1dc64359d on 2020-10-07; PYBv1.1 with STM32F405RG

It is fine described https://micropython.org https://github.com/micropython
Let's begin playing with the board using Micropython at the beginning.
look at help as suggested
>>> help()
Welcome to MicroPython!
For online help please visit http://micropython.org/help/.
Quick overview of commands for the board:
pyb.info() -- print some general information
pyb.delay(n) -- wait for n milliseconds
pyb.millis() -- get number of milliseconds since hard reset
pyb.Switch() -- create a switch object
Switch methods: (), callback(f)
pyb.LED(n) -- create an LED object for LED n (n=1,2,3,4)
LED methods: on(), off(), toggle(), intensity(<n>)
pyb.Pin(pin) -- get a pin, eg pyb.Pin('X1')
pyb.Pin(pin, m, [p]) -- get a pin and configure it for IO mode m, pull mode p
Pin methods: init(..), value([v]), high(), low()
pyb.ExtInt(pin, m, p, callback) -- create an external interrupt object
pyb.ADC(pin) -- make an analog object from a pin
ADC methods: read(), read_timed(buf, freq)
pyb.DAC(port) -- make a DAC object
DAC methods: triangle(freq), write(n), write_timed(buf, freq)
pyb.RTC() -- make an RTC object; methods: datetime([val])
pyb.rng() -- get a 30-bit hardware random number
pyb.Servo(n) -- create Servo object for servo n (n=1,2,3,4)
Servo methods: calibration(..), angle([x, [t]]), speed([x, [t]])
pyb.Accel() -- create an Accelerometer object
Accelerometer methods: x(), y(), z(), tilt(), filtered_xyz()
Pins are numbered X1-X12, X17-X22, Y1-Y12, or by their MCU name
Pin IO modes are: pyb.Pin.IN, pyb.Pin.OUT_PP, pyb.Pin.OUT_OD
Pin pull modes are: pyb.Pin.PULL_NONE, pyb.Pin.PULL_UP, pyb.Pin.PULL_DOWN
Additional serial bus objects: pyb.I2C(n), pyb.SPI(n), pyb.UART(n)
Control commands:
CTRL-A -- on a blank line, enter raw REPL mode
CTRL-B -- on a blank line, enter normal REPL mode
CTRL-C -- interrupt a running program
CTRL-D -- on a blank line, do a soft reset of the board
CTRL-E -- on a blank line, enter paste mode
For further help on a specific object, type help(obj)
For a list of available modules, type help('modules')
review commands listed above
>>> pyb.info()
ID=xxxxxx S=168000000 H=168000000 P1=42000000 P2=84000000 _etext=807401c _sidata=8074024 _sdata=20000000 _edata=2000001c _sbss=2000001c _ebss=20002294 _sstack=2001bff8 _estack=2001fff8 _ram_start=20000000 _heap_start=20002294 _heap_end=2001bff8 _ram_end=20020000 qstr: n_pool=1 n_qstr=3 n_str_data_bytes=28 n_total_bytes=124 GC: 103360 total 1536 : 101824 1=23 2=5 m=40 LFS free: 88576 bytes
CTRL D
Time-related commands
rtc = pyb.RTC() rtc.datetime((2021, 6, 19, 3, 12, 0, 0, 0)) print(rtc.datetime())
control of LEDs 1-4
“1” means off! “0” lits a LED
pyb.LED(1).off() # LED1 lits print(pyb.LED(1).intensity()) #? doesn’t work?
toggle command
pyb.LED(1).toggle()
and others - we can see our board is fully compatible with micropython/ Pyboard standard.
pyb.repl_uart(pyb.UART(1, 9600)) # duplicate REPL on UART(1) pyb.wfi() # pause CPU, waiting for interrupt pyb.freq() # get CPU and bus frequencies pyb.freq(60000000) # set CPU freq to 60MHz pyb.stop() # stop CPU, waiting for external interrupt
Getting a MicroPython REPL prompt
- as desribed https://docs.micropython.org/en/latest/esp8266/tutorial/repl.html
pyb — functions related to the board (PyBoard)
https://docs.micropython.org/en/latest/pyboard/tutorial/switch.html
sw = pyb.Switch() sw.value()
The switch object have one useful feature: the sw.callback() function.
The callback function sets up something to run when the switch is pressed, and uses an interrupt.
sw.callback(lambda:print('press!'))
sw.callback(lambda:pyb.LED(1).toggle())
This will toggle the red LED each time the switch is pressed. And it will even work while other code is running.
To disable :
sw.callback(None)
class Pin – control I/O pins
https://docs.micropython.org/en/latest/library/machine.Pin.html
class Pin – control I/O pins
https://docs.micropython.org/en/latest/library/pyb.Pin.html
http://docs.micropython.org/en/latest/library/pyb.Pin.html#pyb-pin
Pins GPIO
http://docs.micropython.org/en/latest/pyboard/quickref.html#pins-an
Analog to Digital Conversion
http://docs.micropython.org/en/latest/pyboard/quickref.html#adc-analog-to-digital-conversion
http://docs.micropython.org/en/latest/esp8266/tutorial/adc.html
from pyb import Pin, ADC
adc = ADC(Pin('X19'))
adc.read() # read value, 0-4095
digital to analog conversion
from pyb import Pin, DAC
dac = DAC(Pin('X5'))
dac.write(120)
from pyb import SPI
spi = SPI(1, SPI.MASTER, baudrate=200000, polarity=1, phase=0)
spi.send('hello')
spi.recv(5) # receive 5 bytes on the bus
spi.send_recv('hello')
CAN bus (controller area network)
from pyb import CAN
can = CAN(1, CAN.LOOPBACK)
can.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126))
can.send('message!', 123) # send a message with id 123
can.recv(0) # receive message on FIFO 0
Use pip to install the library.
Pip is installed by default on many newer Python builds. To check and see if it is already installed on our system
pip help
or
pip -V
Upgrading Pip
python -m pip install --upgrade pip
In the PyTrinamic folder run "pip install -e."
PyTrinamic is a python library for communicating with TRINAMIC Modules and Evaluation boards.)
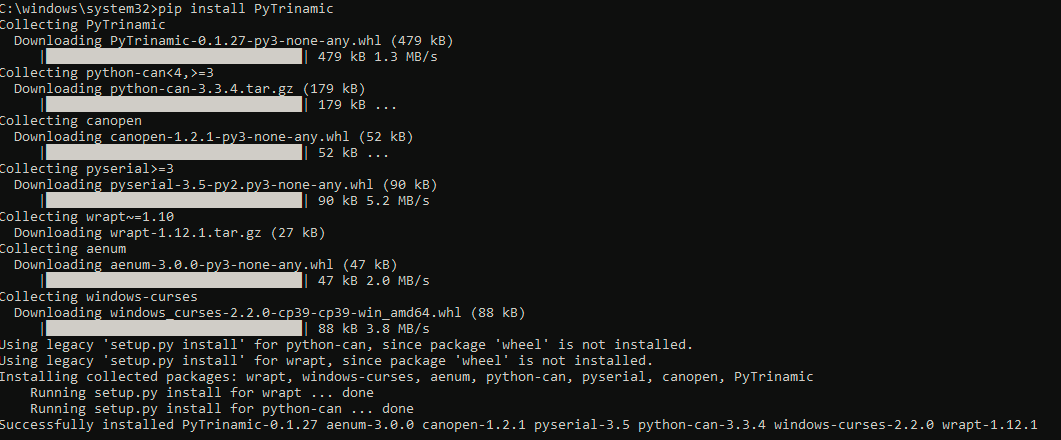
pip install PyTrinamic
This repository provides connection interfaces and example scripts to use TRINAMIC modules aswell as TMCL slave functionality on MicroPython platforms.
It utilizes the PyTrinamic library.
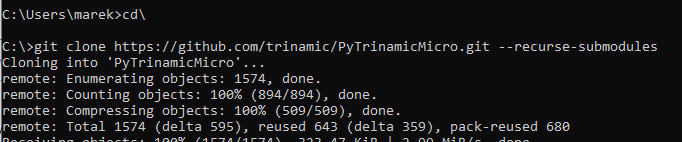
To clone this repository along with all of its submodules from GIT on the PC, use the command:
git clone https://github.com/trinamic/PyTrinamicMicro.git --recurse-submodules
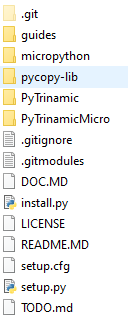
After successful import, I got following contents on the SD on the board
installation went smooth:
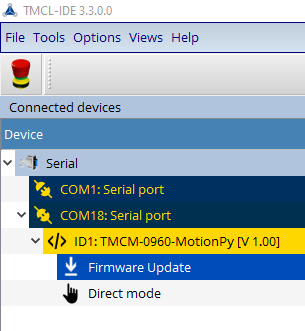
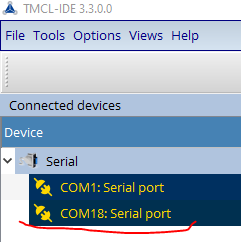
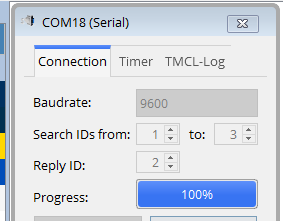
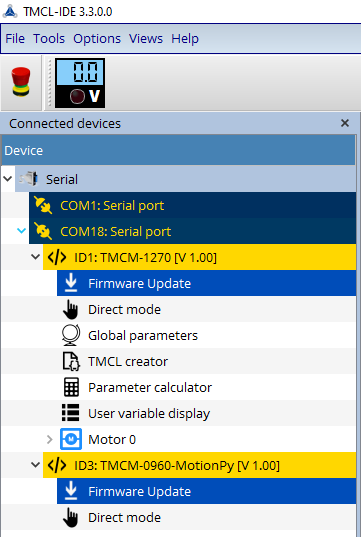
The board seems to be recognized properly and ready to cooperate:
But...
Unfortunately My first joy was too early and all the system had to be adjusted and better prepared.
The only nice working function in the TMCL-IDE was training - virtual mode
TMCL-IDE : Virtual mode
Truly, at that stage I encountered a serious problem with proper setting up the install filesystem and run the board.
I can't say now (after understanding the issues and finally successful run) that instructions are unclear
but honestly it didn't save me from some mistakes and misunderstanding at the beginning.
First I tried to find the answer looking at Trinamic (MAXIM integrated) foras or its Github. Soon I realized I was not alone.
Very similar problem was reported before on MAXIM community portal : TMCL can't connect to TMC EVAL or TMCM
https://maximsupport.microsoftcrmportals.com/en-us/knowledgebase/article/KA-14692
or: https://maximsupport.microsoftcrmportals.com/en-us/knowledgebase/article/KA-12170

Unfortunately it wasn't solved. I decided to use official Trinamic Technical Support.
I opened new case CAS-144538-W1K0F4 https://maximsupport.microsoftcrmportals.com/en-US/edit-loggedin/?id=2f8cbb10-a8b5-eb11-89ee-0004ffa52304
Among confirmation of some basic assumptions concerning supply of motor and the module, starting sequence etc…
"Start with power supply off "is a precaution before connecting the wiring connections from and to the board.
Also there are logic supply connections such as +3.3V and main motor supply +Vcc so for the proper working we need both the connections
(ie it cannot work only if you provide 3.3 to SPI connections externally). As we have the on-board DC-DC converter, power from +Vcc itself
is sufficient to provide the logic power supply (+3.3V)too. That s the meaning of they can be driven by same source.”
There was also “a little” confusing informations and suggestions…
“The communication of TMCM-0960 is possible with TMCL-IDE but default communication is via terminal
You can check out the python code given in our official github link here: https://github.com/trinamic/PyTrinamic.”
and finally I was forced to reinstall the firmware:
"Yes it is necessary to build the micropython in STM32.
Yes it required to install the serial port drivers pybcdc.inf from the root of the attached storage. You need to install without the SD card installed.”
The last sentence worried me indeed:
“As TMCM-0960 is not intended for usage with TMCL-IDE, you can neglect the errors in it. You can use it from the terminal using micropython.”
I was sure an important part of my roadtest would be discovering the TMCL-IDE with all its features and benefits. That message was shocking.
That was a frustrating experience. Moreover, even the onboard micropython was unavailable or I couldn't run it.
The help came from navadeepganeshu and trinamic-lk !
Thanks to the very friendly support of trinamic-lk soon I could continue the work.
I realized some mistakes as installation/ cloning of the repositories in the wrong directories
C:\Users\marek>git clone https://github.com/trinamic/PyTrinamicMicro.git --recurse-submodules
install.py - failed
The problem was fixed after changing co C:\
the right contents of the trinamic folder after clone on the disc:
comparison of right/ wrong folder sizes from successful/ failed installations
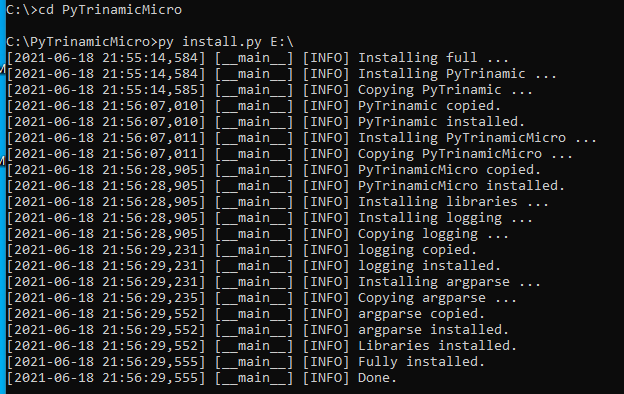
successful installation of the py on the board (SD card):
py install.py E:\
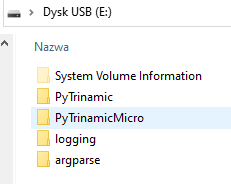
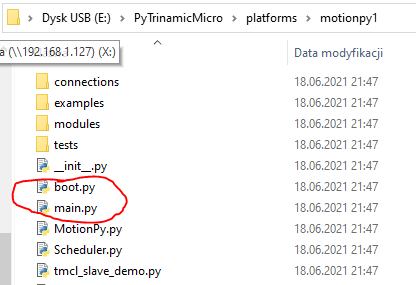
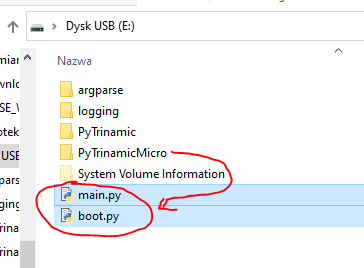
On the boards SD card I have now:
I moved the main.py and boot.py scripts out of PyTrinamicMicro/platforms/motionpy1
to the root
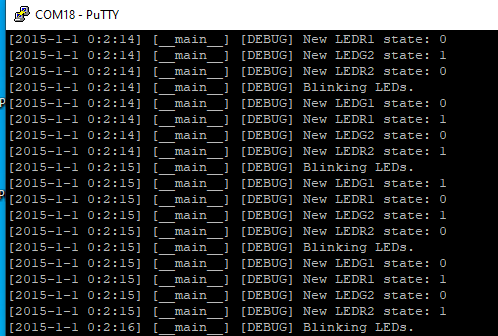
The first, simple test if trinamic library (PyTrinamicMicro) was properly installed was blinky.py script
micropython scripts on trinamic board are executed using following syntax
exec(open("PyTrinamicMicro/platforms/motionpy1/examples/io/blinky.py").read())
exec(MP.script("blinky"))
The loop can be end with Ctrl C
Definitions of leds in blinky script:
leds = [
("LEDG1", Pin(Pin.cpu.A13, Pin.OUT_PP), True),
("LEDR1", Pin(Pin.cpu.A14, Pin.OUT_PP), False),
("LEDG2", Pin(Pin.cpu.A15, Pin.OUT_PP), True),
("LEDR2", Pin(Pin.cpu.B4, Pin.OUT_PP), False)
]
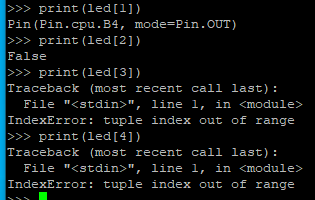
I could run command lines directly in the console:
ON/Off LED:
led[1].value(not(led[1].value()))
led[1].value(1) led[1].value(0)
with "leds" defined as in "blinky" example:
leds[1][1].value(0)
lets all LEDs lit
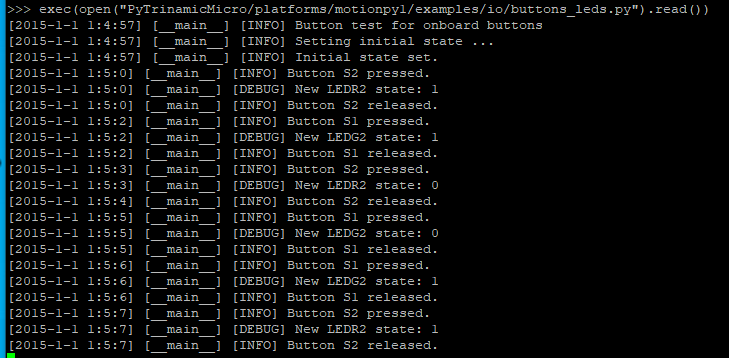
Next example with use of both LEDs and buttons on the board
exec(open("PyTrinamicMicro/platforms/motionpy1/examples/io/buttons_leds.py").read())
that syntax can’t be used
exec(MP.script("buttons_leds"))
this is how we define variables for buttons value
val = button[1].value() print(val)
LEDs are [0] to [3] led[4] is reported as an error!
let’s review that script
first we have imports
from pyb import Pin import logging
then definitions
# Define button list for all buttons on board
buttons = [
("S1", Pin(Pin.cpu.C3, Pin.IN, pull=Pin.PULL_UP)),
("S2", Pin(Pin.cpu.C2, Pin.IN, pull=Pin.PULL_UP))
]
# Define default button states
button_states = {
buttons[0][0]: 1,
buttons[1][0]: 1
}
# Define dict to map button to control LED
leds = {
buttons[0][0]: ("LEDG2", Pin(Pin.cpu.A15, Pin.OUT_PP), False),
buttons[1][0]: ("LEDR2", Pin(Pin.cpu.B4, Pin.OUT_PP), False)
}
now initiate
# Prepare Logger
logger = logging.getLogger(__name__)
# Set initial state
for led in leds.values():
led[1].value(led[2])and the main loop
while(True):
for button in buttons:
val = button[1].value()
led = leds[button[0]]
if((val == 0) and (button_states[button[0]] == 1)):
led[1].value(not(led[1].value()))
button_states[button[0]] = val
switching ON/ OFF
led[1].value(0) # ON led[1].value(1) # OFF led[1].value(led[1]) # OFF led[1].value(led[2]) #ON
understanding and testing logger commands in micropython
https://docs.python.org/3/library/logging.html
logging.getLogger(__name__)
logger.info("Blinky for all LEDs on board")
logger.debug("New {} state: {}".format(led[0], led[1].value()))
logger.debug("New {} state: {}".format(led[0], led[1].value()))
logger = logging.getLogger(__name__)
logger.info("test")
logger.debug
PyTrinamicMicro/platforms/motionpy1/examples/tmcl_analyzer/can_logger.py
exec(open("PyTrinamicMicro/platforms/motionpy1/examples/tmcl_analyzer/can_logger.py").read())
>>> exec(open("PyTrinamicMicro/platforms/motionpy1/examples/tmcl_analyzer/can_logger.py").read())
[2015-1-1 1:1:28] [__main__] [INFO] CAN Logger
[2015-1-1 1:1:28] [__main__] [INFO] Initializing interface ...
[2015-1-1 1:1:28] [__main__] [INFO] Interface initialized.
[2015-1-1 1:1:28] [__main__] [INFO] Initializing tmcl_analyzer ...
[2015-1-1 1:1:28] [__main__] [INFO] tmcl_analyzer initialized.
[2015-1-1 1:1:28] [__main__] [INFO] Start logging.
correct board time using RTC to get propper logs date/time
>>> exec(open("PyTrinamicMicro/platforms/motionpy1/examples/tmcl_analyzer/can_logger.py").read())
[2021-6-19 12:1:24] [__main__] [INFO] CAN Logger
[2021-6-19 12:1:24] [__main__] [INFO] Initializing interface ...
[2021-6-19 12:1:24] [__main__] [INFO] Interface initialized.
[2021-6-19 12:1:24] [__main__] [INFO] Initializing tmcl_analyzer ...
[2021-6-19 12:1:24] [__main__] [INFO] tmcl_analyzer initialized.
[2021-6-19 12:1:24] [__main__] [INFO] Start logging.
and other useful commands from PyTrinamicMicro/platforms/motionpy1/tests/interfaces/
version.py
can_version.py
Let's finally run the whole set. After connecting motor
I ran TMCM1270_rotate.py example script
exec(open("PyTrinamicMicro/platforms/motionpy1/examples/modules/TMCM1270/TMCM1270_rotate.py").read())
After success I tried to explore and learn examples from the PyTrinamic library.
Unfortunately scripts dedicated to TMCM_1270 "TMCM_1270_TMCL_rotateDemo.py" can't be run in my case
exec(MP.script("TMCM_1270_TMCL_rotateDemo.py"))
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
File "PyTrinamicMicro/platforms/motionpy1/MotionPy.py", line 30, in script
File "PyTrinamicMicro/PyTrinamicMicro.py", line 37, in script
TypeError: can't convert 'NoneType' object to str implicitly
exec(open("PyTrinamic/examples/modules/TMCM_1270_TMCL_rotateDemo.py").read())
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
OSError: [Errno 2] ENOENT
PyTrinamic/examples/modules/TMCM_1270/TMCM_1270_TMCL_rotateDemo.py
exec(open("PyTrinamic/examples/modules/TMCM_1270/TMCM_1270_TMCL_rotateDemo.py").read())
>>> exec(open("PyTrinamic/examples/modules/TMCM_1270/TMCM_1270_TMCL_rotateDemo.py").read())
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
File "<string>", line 11, in <module>
File "PyTrinamic/connections/ConnectionManagerPC.py", line 9, in <module>
File "PyTrinamic/connections/pcan_tmcl_interface.py", line 7, in <module>
ImportError: no module named 'can'
I decided to merge and modify above scripts to use : buttons, LEDs and rotate motor
script: rotate_button.py
from pyb import Pin
import logging
import time # gdy uzyjemy polecenia time()
from PyTrinamic.modules.TMCM1270.TMCM_1270 import TMCM_1270
from PyTrinamicMicro.platforms.motionpy1.connections.can_tmcl_interface import can_tmcl_interface
from pyb import Pin
import time
# Define button list for all buttons on board
buttons = [
("S1", Pin(Pin.cpu.C3, Pin.IN, pull=Pin.PULL_UP)),
("S2", Pin(Pin.cpu.C2, Pin.IN, pull=Pin.PULL_UP))
]
# Define default button states
button_states = {
buttons[0][0]: 1,
buttons[1][0]: 1
}
# Define dict to map button to control LED
leds = {
buttons[0][0]: ("LEDG2", Pin(Pin.cpu.A15, Pin.OUT_PP), False),
buttons[1][0]: ("LEDR2", Pin(Pin.cpu.B4, Pin.OUT_PP), False)
}
rotation = {
buttons[0][0]: 5000,
buttons[1][0]: 1000
}
# Prepare Logger
logger = logging.getLogger(__name__)
# Set initial state
for led in leds.values():
led[1].value(led[2])
con = can_tmcl_interface()
module = TMCM_1270(con)
en = Pin(Pin.cpu.A4, Pin.OUT_PP)
en.low()
while(True):
for button in buttons:
val = button[1].value()
led = leds[button[0]]
engine = rotation[button[0]]
if((val == 0) and (button_states[button[0]] == 1)):
led[1].value(not(led[1].value()))
module.rotate(0, engine)
time.sleep(5)
module.stop(0)
led[1].value(1)
button_states[button[0]] = val
en.high()
con.close()working as follow:
after fixing imports
from PyTrinamic.modules.TMCM1270.TMCM_1270 import TMCM_1270 from PyTrinamicMicro.platforms.motionpy1.connections.can_tmcl_interface import can_tmcl_interface from pyb import Pin import time
and definitions
myInterface= can_tmcl_interface() Module_1270 = TMCM_1270(con)
Many trinamic micropython commands can be run directly in shell.
I used it to test TMCL commands defined and described in “TMCLReference and ProgrammingManual”
(TMCL_reference_2015.pdf)
e.g. these lines calls ROR and resulting the same action - rotate motor:
Module_1270.setAxisParameter(Module_1270.APs.TargetVelocity,0,40000) Module_1270.setAxisParameter(2,0,40000) Module_1270.rotate(0,40000) myInterface.send(5, 2, 0, 40000)
the example of possibility of different calling TMCL commands is shown below
scripts from METHOD1 and METHOD 2 do the same job:
method 1
from PyTrinamicMicro.platforms.motionpy1.connections.can_tmcl_interface import can_tmcl_interface from PyTrinamic.TMCL import TMCL_Command, TMCL_Request, TMCL_Reply con = can_tmcl_interface() con.send(TMCL_Command.SAP, 5, 0, 10000, 1) con.send(TMCL_Command.ROR, 0, 0, 50000, 1) con.send(TMCL_Command.MST, 0, 0, 0, 1) con.send(TMCL_Command.SAP, 4, 0, 50000, 1) con.send(TMCL_Command.MVP, 1, 0, 50000, 1)
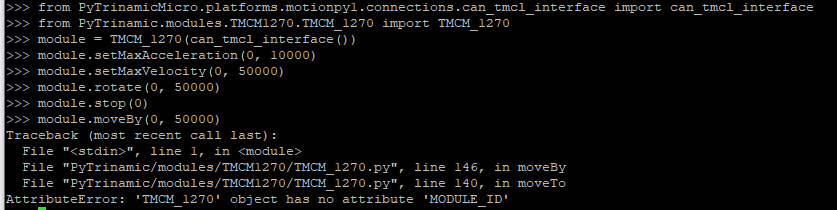
method 2 with defining "module"
from PyTrinamicMicro.platforms.motionpy1.connections.can_tmcl_interface import can_tmcl_interface from PyTrinamic.modules.TMCM1270.TMCM_1270 import TMCM_1270 con = can_tmcl_interface() module = TMCM_1270(con) module.setMaxAcceleration(0, 10000) module.rotate(0, 50000) module.stop(0) module.setMaxVelocity(0, 50000) module.moveBy(0, 50000)
unfortunately in my case module.moveBy(0, 50000) is faulty
I tried to change syntax but unsuccessfully
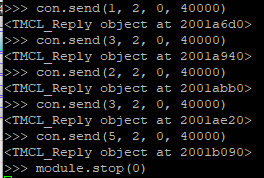
Nevertheless, as we can see all above commands are simple and useful
con.send(1, 2, 0, 40000) #rotate the motor right con.send(2, 2, 0, 40000) #rotate the motor left con.send(3, 2, 0, 40000) #stop motor con.send(5, 2, 0, 40000) # move by...
Everything went fine until I encountered some troubles trying to run scripts tested before.
details and problem analysis below:
from PyTrinamicMicro.platforms.motionpy1.connections.can_tmcl_interface import can_tmcl_interface
from PyTrinamic.TMCL import TMCL_Command, TMCL_Request, TMCL_Reply
ImportError: can't import name TMCL_Command
TMCL_Command can't be imported!!!!
instead TMCL_Command now, should be TMCL !!!!!!!!!!!!!!!
changes in GIT trinamic as we can see TMCL_Command isn't there anymore:
the correct line:
from PyTrinamic.TMCL import TMCL, TMCL_Request, TMCL_Reply
or:
from PyTrinamic.TMCL import TMCL, TMCL_Request, TMCL_Reply, TMCL_Status
con = can_tmcl_interface()
still some errors as we should forget about TMCL_Command
con.send(TMCL_Command.SAP, 5, 0, 10000, 1)
con.send(TMCL_Command.ROR, 0, 0, 50000, 1)
con.send(TMCL_Command.MST, 0, 0, 0, 1)
con.send(TMCL_Command.SAP, 4, 0, 50000, 1)
con.send(TMCL_Command.MVP, 1, 0, 50000, 1)
NameError: name 'TMCL_Command' isn't defined
replacing it with TMCL.COMMANDS
con.send(TMCL.COMMANDS[“SAP”], 5, 0, 10000, 1)
con.send(TMCL.COMMANDS[‘SAP’], 5, 0, 10000, 1)
con.send(TMCL.COMMANDS[‘ROR’], 5, 0, 10000, 1)
con.send(TMCL.COMMANDS[‘MST’], 0, 0, 0, 1)
con.send(TMCL.COMMANDS[‘SAP’], 4, 0, 50000, 1)
con.send(TMCL.COMMANDS[‘MVP’], 1, 0, 50000, 1)
Changing argument for "move by":
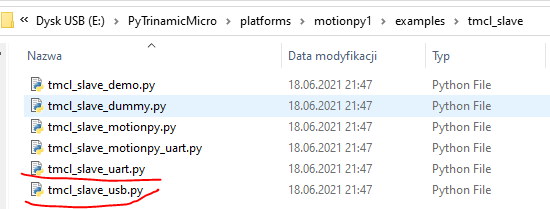
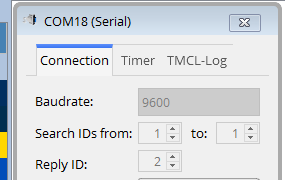
If we want to use TMCL- IDE the board must be in the slave mode
E:\PyTrinamicMicro\platforms\motionpy1\examples\tmcl_slave
tmcl_slave_usb.py
exec(open("PyTrinamicMicro/platforms/motionpy1/examples/tmcl_slave/tmcl_slave_usb.py").read())
no motor - no errors in slave mode:
[1] 23:30:32.590> Get version 0 ‹01 88 00 00 00 00 00 00 89 | 02 30 39 36 30 56 31 30 30› 0960V100
[1] 23:30:32.611> Get version 1 ‹01 88 01 00 00 00 00 00 8A | 02 01 64 88 09 3C 01 00 35› : V 1.00
[1] 23:30:32.621> Get version 0 ‹01 88 00 00 00 00 00 00 89 | 02 30 39 36 30 56 31 30 30› 0960V100
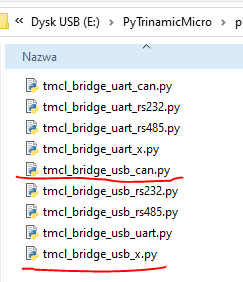
If we want to run motor using TMCL- IDE, the board must be in the bridge mode
tmcl_bridge_usb_can example
E:\PyTrinamicMicro\platforms\motionpy1\examples\tmcl_bridge
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!the script below let us run the motor using TMCL-IDE !!!!!!!!!!!!!!!!!!!!
exec(open("PyTrinamicMicro/platforms/motionpy1/examples/tmcl_bridge/tmcl_bridge_usb_can.py").read())
according to the instruction:
Logging:
[1] 23:26:22.879> Get version 0 ‹01 88 00 00 00 00 00 00 89 | 02 31 32 37 30 56 31 30 30› 1270V100
[1] 23:26:23.043> Get version 1 ‹01 88 01 00 00 00 00 00 8A | 02 01 64 88 04 F6 01 00 00› : V 1.00
[1] 23:26:23.163> Get version 0 ‹01 88 00 00 00 00 00 00 89 | 02 31 32 37 30 56 31 30 30› 1270V100
[1] 23:26:23.747> Get version 0 ‹03 88 00 00 00 00 00 00 8B | 02 30 39 36 30 56 31 30 30› 0960V100
[1] 23:26:23.831> Get version 1 ‹03 88 01 00 00 00 00 00 8C | 02 03 64 88 09 3C 01 00 37› : V 1.00
[1] 23:26:23.843> Get version 0 ‹03 88 00 00 00 00 00 00 8B | 02 30 39 36 30 56 31 30 30› 0960V100
supply 24V
Testing additional features for motor control offered by TMCL-IDE
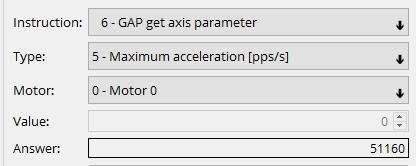
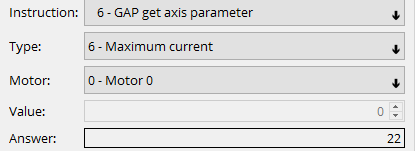
I revieved also availability of direct TMCL commands in the IDE
GAP get axis parameter
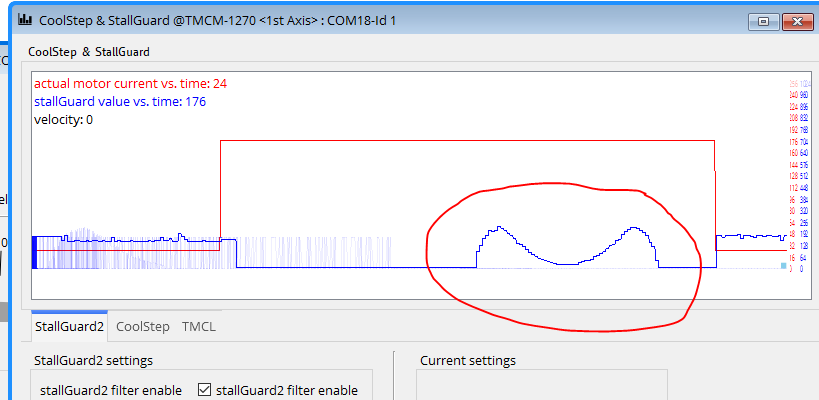
visualization of breaking the motor with support of StallGuard:
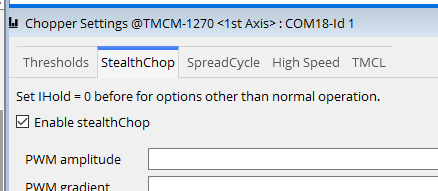
StealtChop function enabling
I'm impressed with easinnes of control motor using micropython. Availability of TMCL commands made me confused, I managed to use and examine only small section.
Appreciating simple scripts or single-line commands in shell I can't neglect more powerful tool as TMCL- IDE. Among user friendly interface and many ergonomic add-ons
I want to emphasize all visualization and reporting outfit of that program. It is perfect in prototyping stage, for debugging and testing motor applications.
I wish I use more TMCL-IDE features and learn how to control motor more efficient, smoother and quiet.
Another highlight is PANdrive motor with control module based on CAN interface.
PD42-1270 stepper is smart indeed. I just started to get familiar with most famous and most advertised functions as StealthChop or StallGuard. But still a few more remained to be learned deeply.
On the other hand TMCM-0960 board impesses with diversity of interfaces. I hope to extend my project soon and try to employ the RS485 and its SPI as well.
BTW I hope to fulfill my last task and decipher "TMCM-0960-MotionPy offers a total of 13 functions via Python" I sincerely hope to get info which are these 13 functions...
Thank you Trinamic/ Maxim Integrated thank you Element14 for given chance to have very informative and educative adventure.
I must apologize for delay and most of all for excess of material in that report.
I feel it should be selected more radically but on the other hand I hope some information would be helpful for somebody entered the realm of MotionPy boards and PANdrives







































Top Comments
nice details and thorough testing.great job, thank you
Nice review, Cool!