


1 引言
近年来,随着汽车产业的迅速发展和人们生活水平的不断提高,我国的汽车数量正逐年增加。同时汽车驾驶人员中非职业汽车驾驶人员的比例也逐年增加。在公路、街道、停车场、车库等拥挤、狭窄的地方倒车时,驾驶员既要前瞻,又要后顾,稍微不小心就会发生追尾事故。据相关调查统计,15%的汽车碰撞事故是因倒车时汽车的后视能力不良造成的。因此。增加汽车的后视能力,研制汽车后部探测障碍物的倒车雷达便成为近些年来的研究热点。安全避免障碍物的前提是快速、准确地测量障碍物与汽车之间的距离。为此,设计了以单片机为核心,利用超声波实现无接触测距的倒车雷达系统。
2整体设计及原理
超声波一般指频率在20 kHz以上的机械波,具有穿透性强,衰减小,反射能力强等特点。工作时,超声波发射器不断发射出一系列连续脉冲,给测量逻辑电路提供一个短脉冲。最后由信号处理装置对接收的信号依据时间差进行处理,自动计算出车与障碍物之间的距离。超声波测距原理简单,成本低,制作方便,但其传输速度受天气影响较大,不能精确测距;另外,超声波能量与距离的平方成正比衰减,因此,距离越远,灵敏度越低,从而使超声波测距方式只适用于较短距离。目前,国内外一般的超声波测距仪,其理想的测量距离
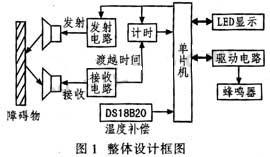
为4~5 m,因此大都用于汽车倒车雷达等近距离测距中。该倒车雷达系统采用单片机控制,如图1所示。利用超声波实现无接触测距,并考虑测量环境温度对超声波波速的影响,而且通过温度补偿法对速度进行校正。使用由集成数字传感器DS18B20构成的温度测量电路,可直接读取温度值,再根据温度补偿得出超声波在某一温度下的波速,由单片机计数脉冲个数获得传播时间,根据超声波测距原理测得并显示距离,再根据显示的距离控制蜂鸣器的发声频率。
2.1超声波测距原理
目前,利用超声波测距的方法有相位检测法、声波幅值检测法、渡越时间检测法三种。相位检测的精度高,但检测范围有限;声波幅值检测易受反射波的影响;渡越时间检测工作方式简单、直观,在硬件控制和软件设计容易实现,其原理是检测从发射传感器发射超声波到经气体介质传播后接收传感器接收超声波的时间差,即渡越时间t。距离s=ct/2(c为声速),t可由单片机计脉冲个数的方法实现。
2.2温度与声速的关系
由于超声波也是一种声波,其声速v与温度T有关。表1列出了几种不同温度下的声速。使用时,若温度变化不大,则可视声速基本不变;若测距精度要求很高,则应通过温度补偿法予以校正。

一般情况下,利用v=331+0.60T进行温度补偿,以适应不同温度下的工作要求。表2给出补偿后声速与温度的关系。可以看出,0℃以下时声速值完全吻合;0℃以上最大误差不超过5%。

由上述分析可知,温度测量的精度不仅直接影响了速度的测量精度,而且也间接影响距离的测量精度,所以温度的测量很关键。
3硬件电路设计
倒车雷达系统主要由超声波发射电路、超声波接收电路、温度测量电路及显示报警电路构成。
3.1超声波发射电路
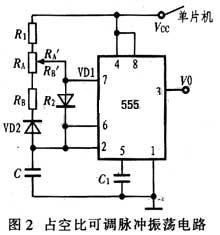
在单片机控制下,使脉冲发生器输出超声波。脉冲发生器由555构成,其连接如图2所示。7引脚和6、2引脚的上下为R和C;中间R与RP并联,RA=Rl+RA'''''''',RA=R2+RB'''''''',且T1=0.693RAC,T2=0.693RBC,通过调节RA和RB的阻值,实现输出波形的占空比的可调。但是,这里需要50%占空比的方波,因此调节滑动变阻器,使T1=T2,频率的计算公式为:
f=1.443/(RA+RB)C (1)
合理选择R,C可使超声波获得40 kHz的输出脉冲。因为超声波的传输要有一段距离,为了使信号便于传输,通常要在发射电路的后面加上一个调制电路。
上一页12下一页
