


Hello,
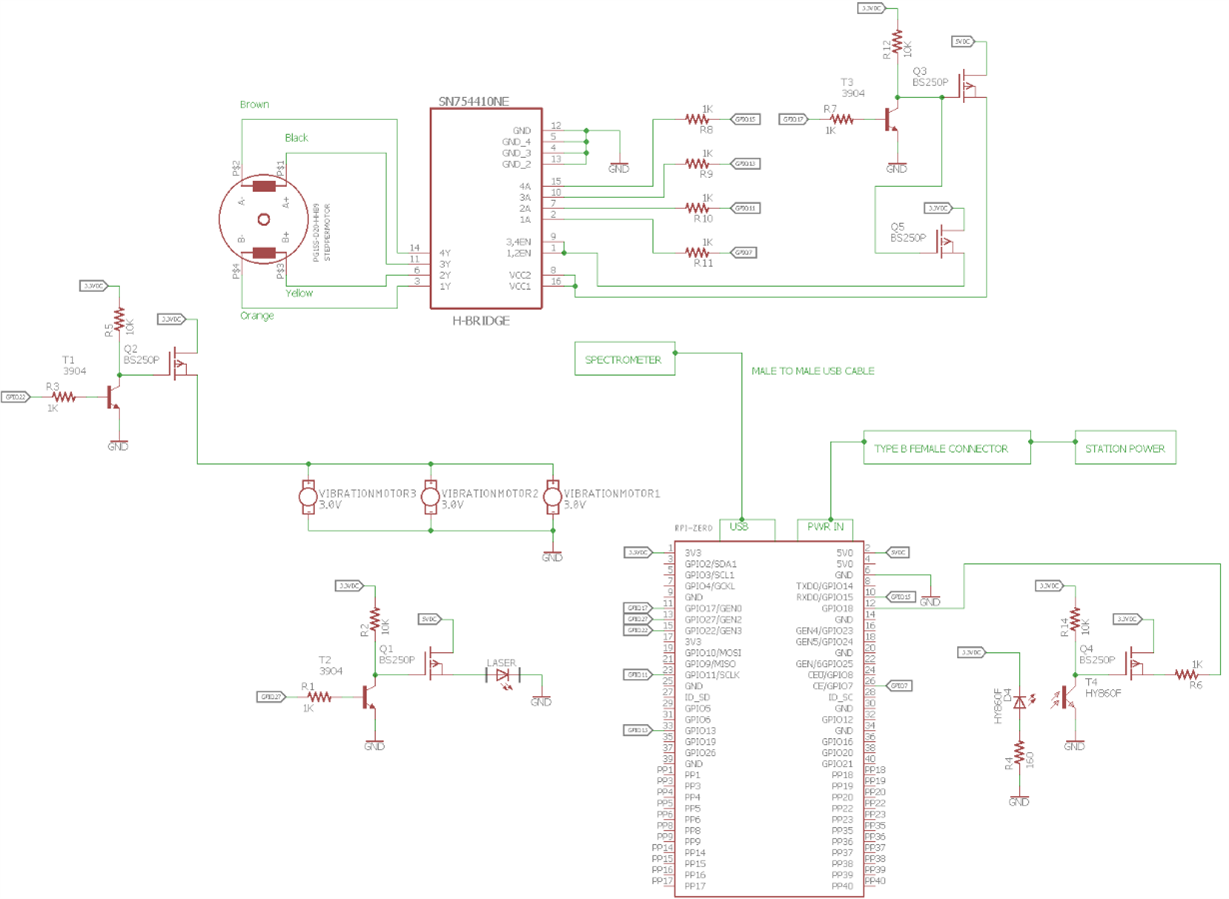
I am powering and controlling a few small coin vibration motors, a stepper-motor controller, and a stepper-motor with a Raspberry Pi Zero (schematic attached and shown below). I have a lot of questions; please bear with me! 
jw0752, You have given me great answers in the past, so I trust you the most!
1. How would you calculate the value of a filter capacitor for a DC motor? In my case, I want to filter the noise coming from the small vibration motors, but I would like to know mathematically, not just a rule of thumb, so I can calculate values properly for future projects.
a. Would you ever put two capacitors in parallel for any reason (i.e. for redundancy of some sort)?
b. I have found by tearing apart products (especially small RC cars) over the years that a 0.1uF ceramic capacitor in parallel will do the trick to filter the noise coming from small DC motors. Would this be a good rule-of-thumb to follow for quick applications?
c. Do brush-less motors need filtering capacitors? (i.e.does the same calculate/rule-of-thumb apply to both motors with brushes and motors without brushes?)
d. Since these vibration motors are so small, would I need a filtering capacitor for my application?
e. Do stepper-motors need filtering capacitors?
i. Since my stepper-motor is so small, would I need filtering capacitor(s) for my application?
ii. I have read online that you would place your filtering capacitor close to the input of your stepper-motor driver; I assumed that you would place a non-polarized capacitor across each stepper-motor coil. Where should I place my capacitor(s)?
iii. Do I need capacitors for both the input and outputs of my stepper motor driver?
2. Also, is it okay to connect the gates of two MOSFETS to the same gate-controlling circuit(shown in the upper-right corner of the schematic I need to control pins VCC1 and VCC2 with 5V and pins 1,2EN and 3,4EN with 3.3V simultaneously(these pins are located on the SN754410NESN754410NE stepper-motor driver IC
3. Last thing, I want to create a simple circuit that will send a high logic level of 3.3V to a GPIO pin on the Raspberry Pi when current flows across the vibration motors. This circuit will be used to let the Raspberry Pi know if the vibration motors are spinning successfully or not. The dilemma I have run into is if a motor were to fail and therefore not spin, would the same amount of current flow across the non-spinning motor and give a false reading to the Pi, indicating that the motor is spinning? (This brings me to my questions below)
a. Would the amount of current flowing thought a DC motor change if the rotor is rotating or not? (i.e. current flowing with the rotor freely spinning vs the rotor stuck in place)
b. Would the amount of current flowing thought a DC motor under normal operation be identical to the amount of current flowing through the motor if the motor were to break internally and cause a direct short? (i.e. current flowing through motor under normal operation vs broken motor with internal direct short)
i. Would it make a difference if the DC motor is brush-less or not?
 |



