


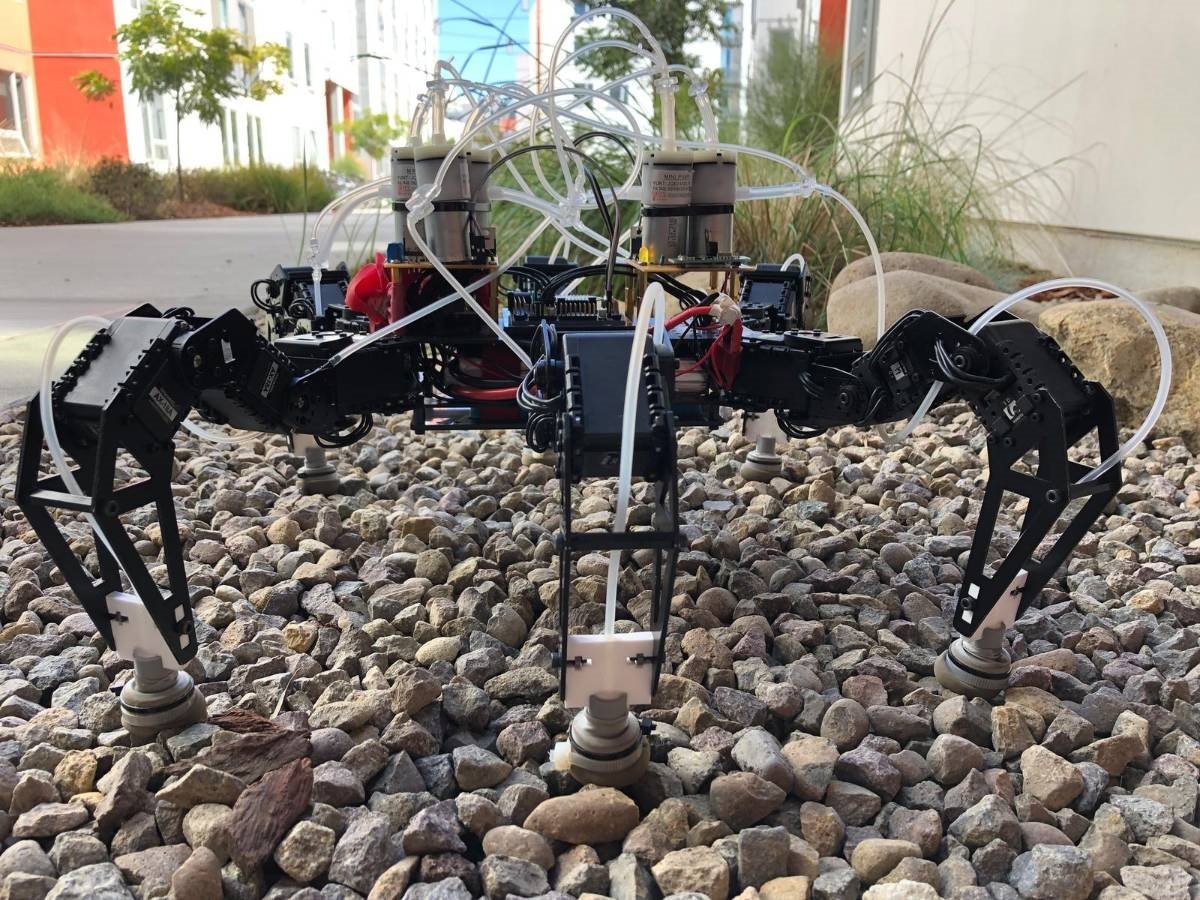
Robots outfitted with these boots designed by researchers from UC San Diego can move 40 percent faster on uneven terrain. (Image Credit: UC San Diego)
Roboticists are always striving to develop robots with improved functionality, especially if it involves walking around. Researchers from the University of California San Diego have discovered that robots can safely and more efficiently traverse on uneven terrain if they're outfitted with a set of boots. Using latex and coffee grounds, the team developed flexible feet that allow a robot to walk up to 40 percent faster on rough surfaces, such as pebbles and wood chips. In the future, the flexible feet could be used in search-and-rescue missions and space exploration. The team will present their findings at the RoboSoft conference that takes place from May 15 to July 15 2020.
"Usually, robots are only able to control motion at specific joints," said Michael T. Tolley, a professor in the Department of Mechanical and Aerospace Engineering at UC San Diego. "In this work, we showed that a robot that can control the stiffness, and hence the shape, of its feet, outperforms traditional designs and is able to adapt to a wide variety of terrains."
The team found inspiration from nature to create the boots. Upon designing the feet, which are flexible spheres made from a latex membrane, the team filled them with coffee grounds. Small structures similar to plant roots were then embedded into the coffee grounds. This allows robots to traverse more quickly while having a better grip due to a physics concept called "granular jamming," allowing the coffee grounds to move back and forth, behaving like a solid and a liquid.
As soon as the robot's feet touch the ground, they can firm up, matching the ground's shape underneath, which provides strong footing. Afterward, when the robot lifts its feet up, they un-jam and loosen before touching the ground again. The root-like structures help to keep the boots stiff as they're jammed.
The boot matches the shape of the ground the robot is stepping on, making it much easier for it to walk on. (Image Credit: UC San Diego)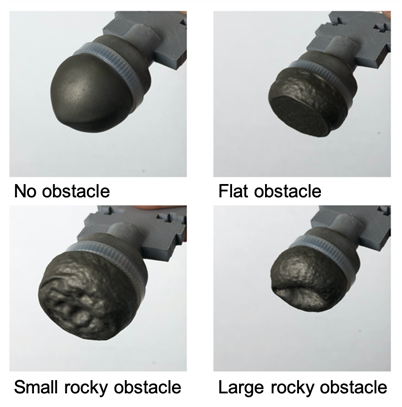
This is the first time ever that these feet have been tested on uneven terrains, such as wood chips and gravel. To test it out, the team installed the boots on a commercially available hexapod robot. They designed and created an on-board system capable of generating negative pressure to help control jamming and positive pressure to unjam the feet as they lift up. As a result, the system behaves like a vacuum, sucking the air out from the coffee grounds, causing the foot to stiffen and loosen up. The feet can also be passively jammed from the robot's weight, pushing air out between the coffee grounds, which also causes them to stiffen.
The team tested the robot walking on flat ground, wood chips, and pebbles, both with and without the boots. They discovered that passive jamming feet perform best when it's used on flat ground, but with active jamming intervention, the boots performed best on loose rocks. In both scenarios, the feet helped the robot's legs improve its grip on the ground, which lead to a 40 percent increase in speed. Improvements also became more significant when the robot moved up sloped, uneven terrain.
"The natural world is filled with challenging grounds for walking robots---slippery, rocky, and squishy substrates all make walking complicated," said Nick Gravish, a professor in the UC San Diego Department of Mechanical and Aerospace Engineering. "Feet that can adapt to these different types of ground can help robots improve mobility."
The team's next goal will be to incorporate soft sensors on the bottom of the feet. This will make it possible for an electronic control board to identify the type of ground it comes in contact with and to determine if the feet need to be actively or passively jammed. They will also work on making the feet more efficient by improving control algorithms and design.
Have a story tip? Message me at: cabe(at)element14(dot)com