


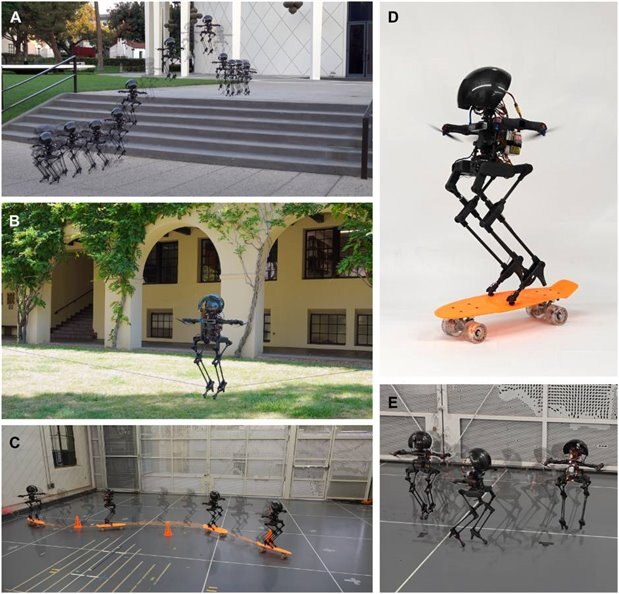
Image showing LEO performing different locomotion maneuvers. (Image Credit: Caltech Aerospace Robotics and Control Lab / Science Robotics)
Caltech researchers developed a bipedal robot called LEONARDO (LEgs ONboARD drOne) capable of walking and flying, producing new locomotion. This feature makes it very nimble and allows it to generate complex movements. The walking robot and flying drone, short for LEO, hops, walks a slackline and even rides a skateboard. LEO is the first bipedal robot that can control its balance via multi-joint legs and propeller-based thrusters.
"We drew inspiration from nature. Think about the way birds are able to flap and hop to navigate telephone lines," says Soon-Jo Chung, corresponding author and Bren Professor of Aerospace and Control and Dynamical Systems. "A complex yet intriguing behavior happens as birds move between walking and flying. We wanted to understand and learn from that."
"There is a similarity between how a human wearing a jet suit controls their legs and feet when landing or taking off and how LEO uses synchronized control of distributed propeller-based thrusters and leg joints," Chung adds. "We wanted to study the interface of walking and flying from the dynamics and control standpoint."
Utilizing a hybrid movement that involves walking and flying provides researchers with the best type of locomotion. LEO’s lightweight legs remove thruster stress by supporting most of the weight. LEO gets its exceptional balance from the thrusters, which are synchronously controlled with leg joints.
"Based on the types of obstacles it needs to traverse, LEO can choose to use either walking or flying, or blend the two as needed. In addition, LEO is capable of performing unusual locomotion maneuvers that even in humans require a mastery of balance, like walking on a slackline and skateboarding," says Patrick Spieler, co-lead author of the Science Robotics paper.
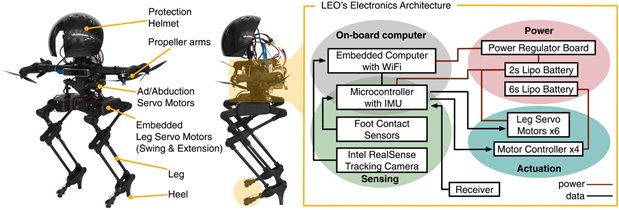
LEO’s main electronic and mechanical components. (Image Credit: Caltech Aerospace Robotics and Control Lab / Science Robotics)
Standing at 2.5 feet tall, LEO features two legs with three actuated joints. It also has four propeller thrusters attached at an angle on the robot’s shoulders. The robot walks just like a human. A person adjusts their legs' position and orientation while walking, causing their center of mass to move forward while maintaining balance. Meanwhile, the propellers keep the robot upright as it walks, and the actuators change the legs’ positioning. This causes the robot’s center of mass to move forward via synchronized walking and flying controller. LEO also uses its propellers alone to fly like a drone.
"Because of its propellers, you can poke or prod LEO with a lot of force without actually knocking the robot over," says Elena-Sorina Lupu (MS '21), a graduate student at Caltech and co-author of the Science Robotics paper.
In the future, the researchers want to enhance LEO’s performance by developing a more rigid leg design that supports more than the robot’s weight and increasing the propellers’ thrust force. They also want to make LEO more autonomous, allowing it to understand how much weight its legs support and how much its propellers need to support while it walks on uneven terrain.
Additionally, the team wants to mount LEO with a drone landing control algorithm that uses deep neural networks. This will allow the robot to decide between walking, flying, or hybrid movement to move from one destination to the next based on the safest approach that uses less energy.
"Right now, LEO uses propellers to balance during walking, which means it uses energy fairly inefficiently. We are planning to improve the leg design to make LEO walk and balance with minimal aid of propellers," says Lupu, who will continue working on LEO throughout her Ph.D. program.
For now, LEO is just a research project. Until the team fixes some design challenges, the robot won’t be ready for commercial use. For example, it can fly for 100 seconds or walk for 3.5 minutes before needing a recharge. So the battery life must be improved before it can inspect high power lines or tall bridges.
Have a story tip? Message me at: http://twitter.com/Cabe_Atwell