


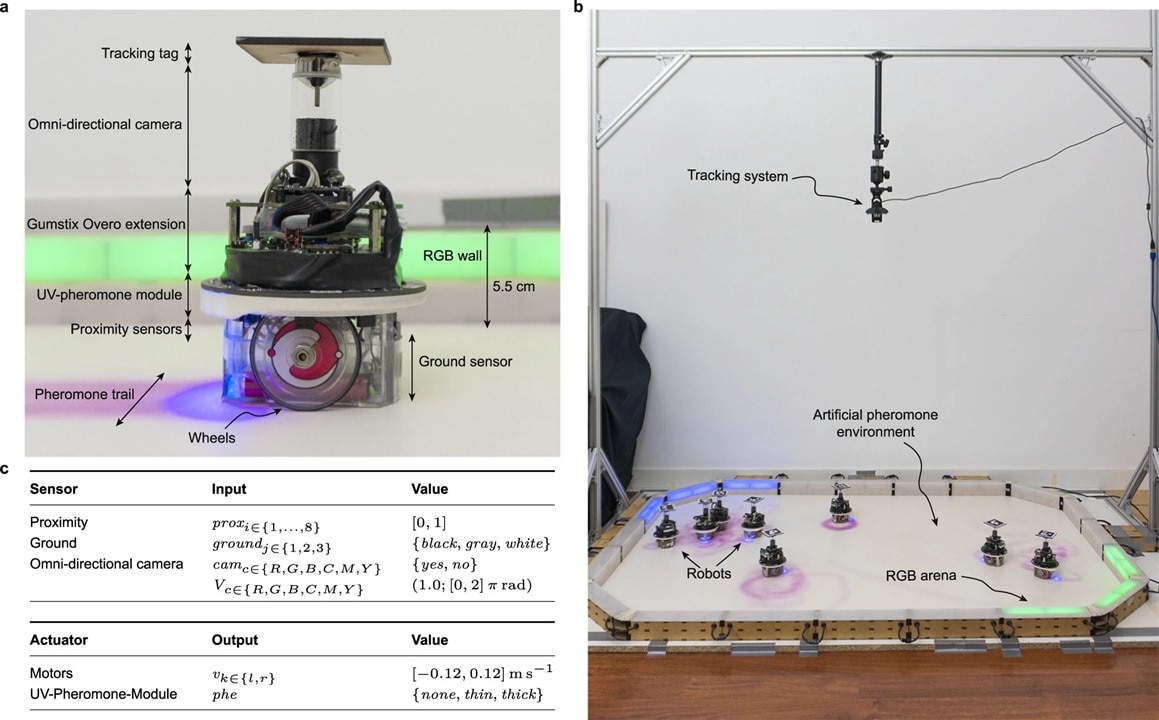
The tiny robot (left) mimicked an ant’s behavior, and the swarm performed four different tasks in the experimental arena (right). (Image Credit: communications engineering)
When are we getting swarmbots as toys?
Researchers recently developed a swarm of tiny robots that replicate ants’ behavior and communication. Ants communicate through a mechanism called stigmergy, where individuals influence their peers via environmental modification. In this scenario, these insects release pheromones as a chemical message so others can follow it, helping them navigate between food sources and nests.
The team programmed the robotic swarm to release and detect synthetic pheromones, which enabled them to communicate with one another. Afterward, the swarm was placed inside a rectangular arena with walls featuring RGB blocks that produce a color based on the assigned mission. The automatically designed robotic swarms’ collective behaviors performed similarly compared to the manual types. In the environment, the robotic ants showed they could navigate efficiently and find their targets.
In the aggregation mission, the swarm had to aggregate anywhere, which involved laying and sensing synthetic pheromone trails. Each bot used this method to attract other bots and aggregate via stigmergy. However, the environment could become saturated since robots may release pheromones simultaneously in various regions, and that causes them to get stuck. So, the team developed control software, allowing the robots to lay pheromone trails for a short amount of time and detect traces left behind by other bots. This prevented them from saturating the environment.
In the decision-making mission, the robots had to congregate in one of two areas. These areas were designated by RGB blocks that display a blue or green color. If a robot spends time in the blue area, it receives two points, and spending time in the green one gives it a one-point reward. These RGB blocks aren’t switched on halfway through each experimental run, so the robots can’t determine which region they’re heading into. The robots must quickly congregate and stay in the region (blue) that awards the highest score, even after removing the cues.
The swarm correctly congregated into the blue region, using stigmergy to attract others and stay there once the environmental cues were removed. “However, in the real-robot experiments, some robots that gathered in the blue region spilled out of the boundaries of the region, although remaining in its vicinity,” the team wrote in the paper. This meant the real-robot experiments had a worse performance compared to the simulations.
Overall, this could lead to contributions in disaster response, space exploration, and agriculture industries. For example, these robotic swarms can quickly and efficiently locate survivors in a disaster zone as part of search and rescue operations. Robotic swarms like these could deploy on planets and moons to collect data and conduct experiments. Lastly, in agriculture, the swarms could pollinate crops or apply pesticides.
Have a story tip? Message me at: http://twitter.com/Cabe_Atwell
