



The DEAnsect is a robust robot that can be twisted, squeezed and bent while retaining functionality. (Image Credit: EPFL)
It’s fairly easy for nature to serve as a source of inspiration when it comes to robotic development, but it’s nearly impossible to replicate nature’s design and features in any given way. Researchers from EPFL’s School of Engineering have developed a soft robotic insect named DEAnsect, which is 4cm in length, weighs less than a gram and uses artificial muscles to propel itself at 3 cm per second. It’s also pretty robust that it can be twisted, squeezed and bent while retaining functionality. Even if it’s hit with a fly swatter, the robotic insect will just keep moving. The team published their paper in the journal Science Robotics.
The team equipped DEAnsect with low-voltage dielectric elastromer actuators (DEAs), which is a type of artificial muscle that drives the robot forward through vibrations. These DEAs are responsible for making the insect robot lightweight and quick. They also allow the robot to move on all types of terrain, including slopes.
Power is supplied to the DEAnsect through a lithium polymer battery operating at 450V and over 600Hz. It’s also fitted with optical sensors, electrodes and a microcontroller. By using these ultralight electronics, the robot is able to sense light and dark, allowing it to autonomously navigate in those types of environments.
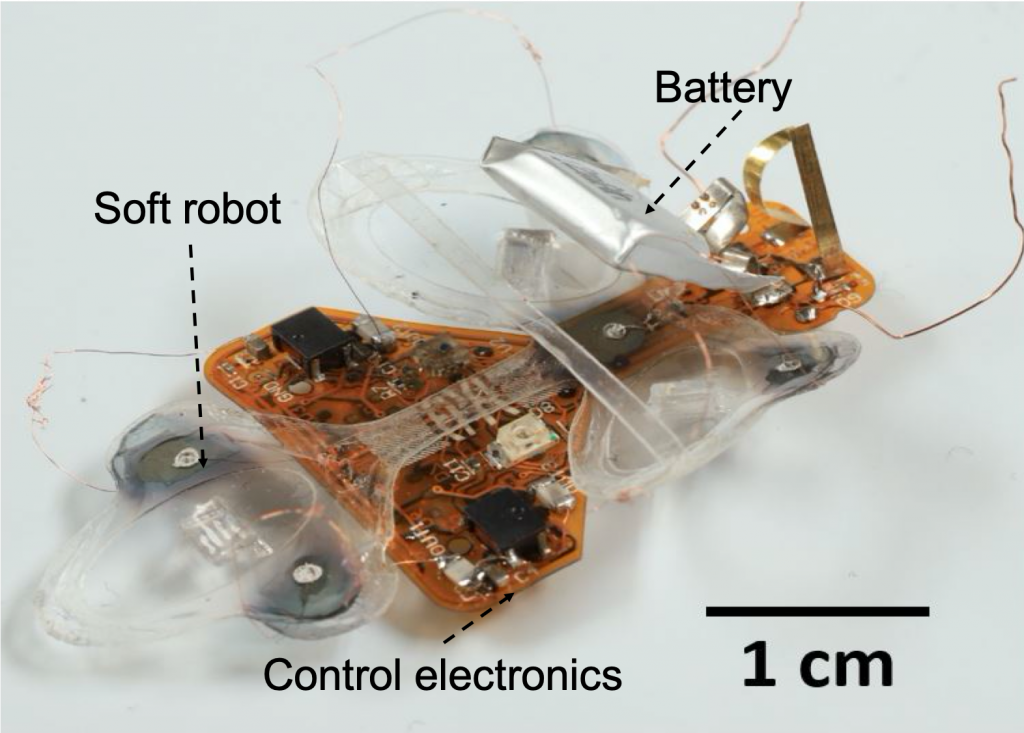
The DEAnsect is 4cm in length, weighs less than 1g, and uses artificial muscles that propel it at 3cm per second. It also carries its own Li-polymer 450V battery that supplies power to the electronics. (Image Credit: EPFL)
The artificial muscles are made of an elastromer membrane placed between two soft electrodes. When the voltage is applied, both electrodes become attracted to one another, compressing the membrane, which sets it back to its original shape when the voltage is removed. The insect’s three legs (front, left, and right) are all fitted with these artificial muscles, causing the legs to move forward or backward 450 times per second whenever the voltage is switched on or off.
By applying nanofabrication techniques to the DEAnsect, the team was able to power the artificial muscles at low voltages. This was achieved by reducing the thickness of the elastromer membrane and by creating soft, highly conductive electrodes that are only a few molecules thick. This made it possible to reduce the size of the battery.
This technique paves the way for future robots to be used for inspections, remote repairs, or to gain a deeper understanding of insect colonies by having a robot live with them.
The team’s goal was to show that, by combining artificial muscles with low-mass electronics, they are able to develop untethered autonomous walking robots.
Have a story tip? Message me at: cabe(at)element14(dot)com
Top Comments