


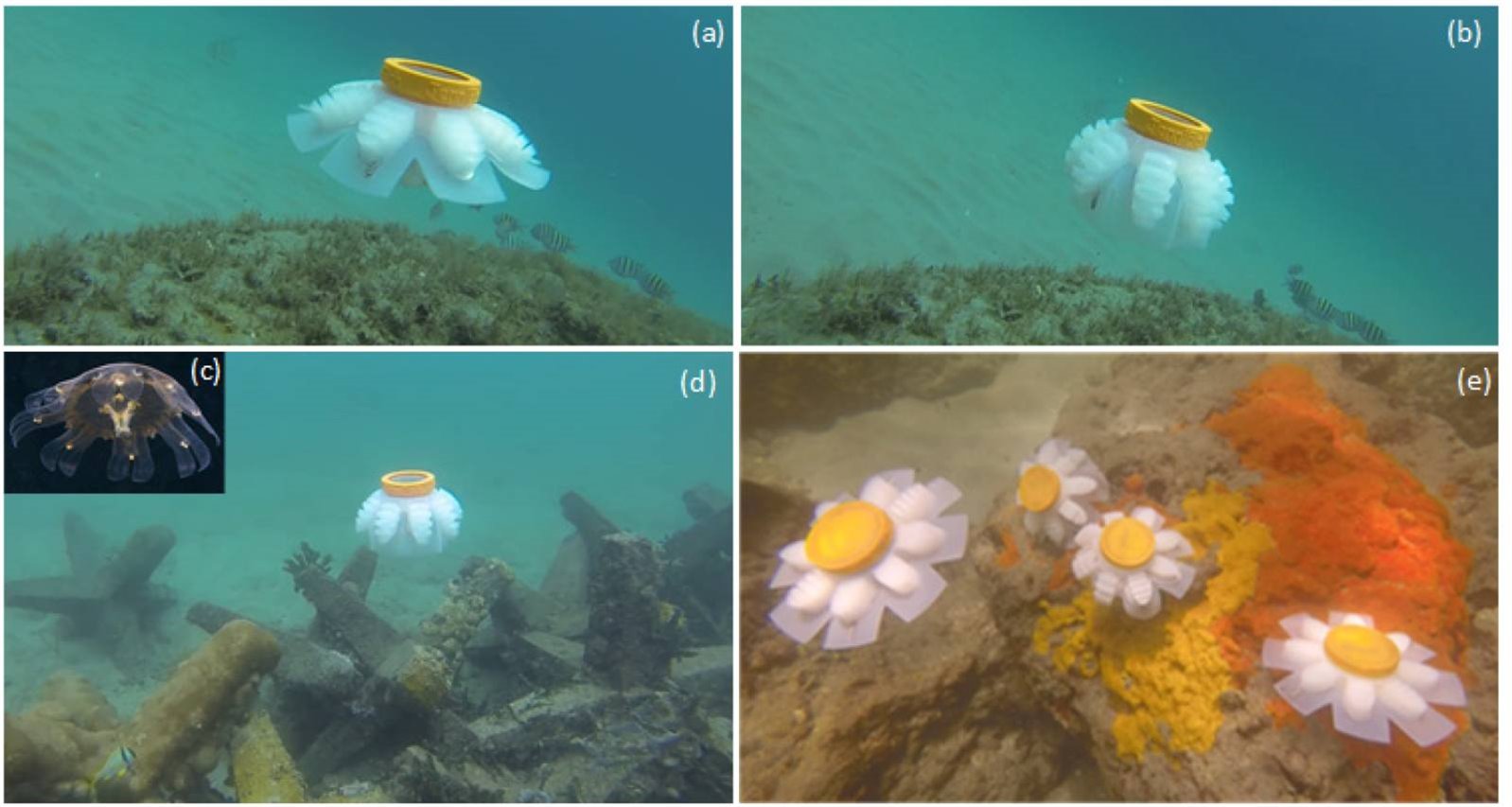
The jellyfish robots navigate underwater using eight pneumatic network tentacle actuators. (Image credit: FAU via IOPScience)
Researchers from the Florida Atlantic University have designed a robotic jellyfish to monitor and explore delicate coral and sponge ecosystems without using propellers, or any navigation platform underwater drones typically use that could potentially cause harm to said reefs.
According to the researchers, the jellyfish-like robot could be adapted for a myriad of applications, including low frequency/low power sensing, surveillance/ monitoring in ocean environments, ocean floor mapping, STEM education platform, and swarm robotics.
The robotic jellyfish was designed using eight soft pneumatic network tentacle actuators for propulsion and navigation. Since hydraulic actuation using soft materials has a tendency to bulge at the farthest end of the limb, the researchers used oblong-shaped tentacles that are similar to PneuNet bending actuators, which function using a series of chambers inside the elastomer (in this case Smooth-On Echoflex) that inflate when pressurized to create motion.
To steer the robot, the researchers equipped a pair of impeller pumps, which inflate/deflate four of the tentacles on each side respectively. Seawater from its surroundings is used as a hydraulic fluid and is pumped into the tentacle chambers to produce a swimming stroke in the desired direction.

The robot was designed using a pair of Teensy 3.2 microcontrollers and a series of sensors along with custom PCBs for navigation and controlling the tentacles. (Image credit: FAU via IOPScience)
The robot is controlled using a pair of Teensy 3.2 microcontroller development boards, which are mounted on custom PCBs that are outfitted with an Invensense MPU-9250 9 axis motion sensor, a water temperature sensor, which all packs neatly in a 3D printed cylindrical waterproof housing. Hall Effect sensors were also used as a way for the researchers to communicate with the robot underwater by using a magnetic wand to cycle through the robot’s operational modes, which was programmed using Arduino code (not sure which).
As for what lies ahead for these robotic jellyfish, the researcher’s state they plan to revise the design so they can communicate wirelessly, rather than through the Hall Effect sensors, which would open the possibilities of gathering large amounts of data and transmitting it in real-time.
Have a story tip? Message me at: cabe(at)element14(dot)com
http://twitter.com/Cabe_Atwell