


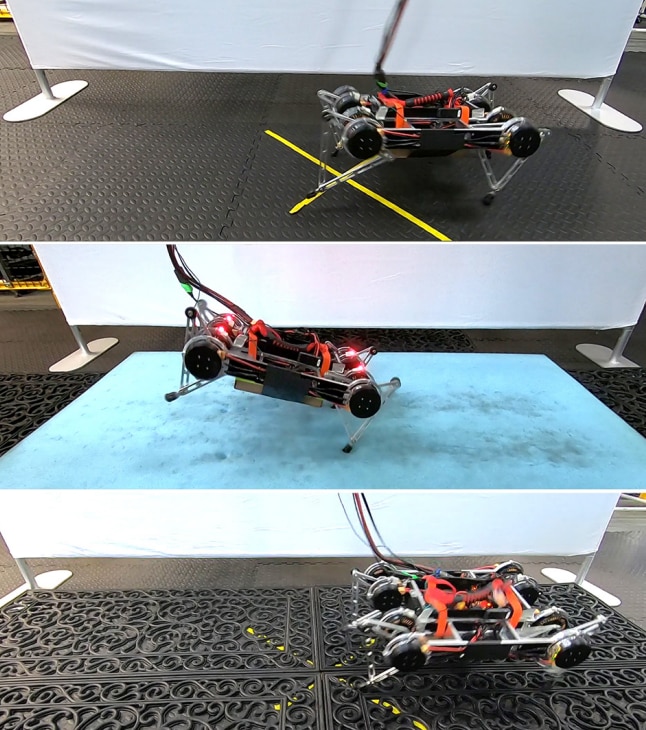
The Minotaur robot learns how to walk across various real-world surfaces (Image credit: Google)
Just like with any task in life, learning how to walk requires trial and error. You’re going to stumble and fall quite a bit before you get it. You may even need help from your parents to pick you up when you’re down. But eventually, you start walking all on your own. Now, imagine a robot going through a similar process, but without human interference. That’s a discovery researchers at Google recently made in their latest study.
Within just a few hours, the Minotaur, a small four-legged robot, was able to walk forward, backward, and turn left and right all on its own. To achieve this, researchers used reinforcement learning to help the robot figure out how to maneuver in the real world. Typically, reinforcement learning is done via simulated environments, but it can be a taxing process with its own challenges. To avoid these issues, researchers went to the next level and let the robot walk around a physical environment. Once it got the basics down, they left it to travel across different terrains, like a memory foam mattress, soft ground, and a textured doormat.
With environment issue solved, researchers still had to address the number of times someone had to help the robot. To solve this, they enabled multiple types of learning at once. Whenever the robot fell, the team added another hard-coded algorithm to help it stand back up. After various tweaks, the robot was able to walk without the need for manual resets. Compare this to the team’s prior robot in 2018, which required 100 manual resets.
“I think this work is quite exciting,” says Chelsea Finn, an assistant professor at Stanford who is also affiliated with Google but not involved with the research. “Removing the person from the process is really hard. By allowing robots to learn more autonomously, robots are closer to being able to learn in the real world that we live in, rather than in a lab.”
Though Minotaur can walk on its own, its setup needs a motion capture system above the robot to determine its location, which isn’t possible in the real world. Going forward, researchers will continue working on the robot in hopes of automating the coding process. They also hope to adapt their algorithm to different kinds of robots in the future. Thinking about the possibility of robots learning how to walk on their own makes us question, should we be afraid of them now?
Have a story tip? Message me at: cabe(at)element14(dot)com
Top Comments