


Researchers at MIT have built a fabrication system and a design space that can be used to create fluidic chambers and channels at millimeter-scale size for actuating thin film shape-changing materials with a high-resolution design. The project, milliMorph, is a four-dimensional space that can be used to create fluidic chambers that uses a heat sealing system for millifluidic fabrication, and application demonstrations of the fabricated materials for devices, haptics and robotics.
There is increased interest in the soft robotics field for fluidic-based shape-changing (pneumatic & hydraulic) materials. That’s mostly because the fluidic-based shape-changing materials are lightweight, which presents new opportunities to use them in wearable tech, robots and interfaces in the future.

The butterfly robot, created by using the milliMorph platform, can flutter its wings at 10 Hz. (Image Credit: MIT Tangible Media Group)
The team’s milliMorph platform seals quasi non-elastic films like Mylar or PET without coming in contact with the film’s surface. By doing so, the researchers were able to fabricate a 1mm and 0.5mm narrow channel/chamber, which reduces the amount of fluid needed for the system. They also created a sensing layer by leveraging the metallic coating of film for interactivity. As a result, the shape-changing material can be scaled down, allowing it to make transformation possible.
The actuation medium for milliMorph is quite diverse. The team uses four possibilities for this medium, which are air, water, low boiling point liquid and UV sensitive resin. The films can be actuated at very high frequency when using air as the actuation medium. This is due to the fast travel rate through microchannels. The hydraulic system requires more energy to power up and is slower than the pneumatic system. Since the milliMorph only requires a tiny amount of medium, it can be run by hydraulic systems with low energy consumption. Water is also suitable for sequence control and stiffness. Due to the phase change of low boiling point liquid being untethered, milliMorph can be used in mobile and wearable applications without needing an external system. The system also requires less energy to run since it needs less volume change to complete its transformation and it has a larger surface-area-to-volume ratio, enabling faster response and reverse time.
Photosensitive resin can be injected and cured for 2D to 3D fabrication. It only requires a small amount of resin compared to conventional 3D printing.
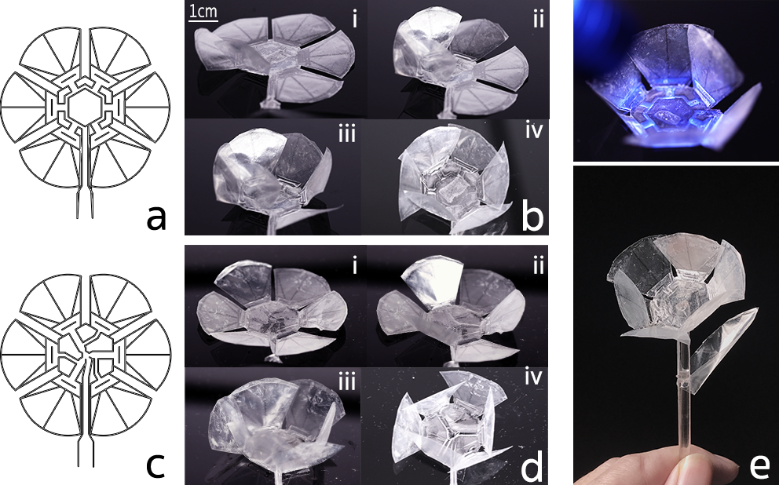
Researchers also developed a flower using the milliMorph, which is capable of folding in a similar way as a real flower. (Image Credit: MIT Tangible Media Group)
MilliMorph can be actuated in two different ways, electrically and non-electrically. The non-electrical method involves using a pipette and squeezing it manually. The low volume of air is sufficient enough to create a shape change. When higher volume, higher flow rate, or more precise control is needed, a compressor, control board, and valves can also actuate the system. Another alternative involves injecting milliMorph with low boiling point liquid, causing it to react to temperature change and alter its shape. In this circumstance, milliMorph can be driven electrically by using heating circuits.
By using the milliMorph system, the researchers were able to develop a butterfly that can flap its wings at 10 Hz when it’s connected to computer-controlled valves, similar to a real butterfly. They also developed a haptic latex glove that changes texture whenever it comes in contact with an object. The team hopes the milliMorph system will be used in various applications, which can be used in future product designs with transformational abilities.
Have a story tip? Message me at: cabe(at)element14(dot)com