


The robot can autonomously land on a moving platform, both in normal and windy conditions. (Image Credit: MIT, YouTube)
It can be quite challenging to land a multirotor vehicle autonomously onto an intended target, especially when there is a need for fast trajectory planning, precise control, and the platform will need to be accurately localized. Past projects studied this issue, but they didn’t take windy conditions into consideration, which would make it more challenging to land on the targeted area. Now, researchers from MIT have developed a fully autonomous vision-based system that’s capable of quickly and accurately landing on a moving platform, even in windy conditions.
The system was built with an optimization-based trajectory generation to help with dynamic landings on a moving platform. It also uses a robust control system, which compensates for turbulence created by windy conditions. Additionally, it contains a finite state machine (FSM) that determines the behavior of the quadrotor, which consists of four states: stand by, search, landing, and end.
Stand by state allows the quadrotor to take off into the air and hover at a specific altitude above the area where it started. Afterward, the FSM changes to search state. While in search mode, the quadrotor uses the unmanned ground vehicle’s (UGV) simulated GPS coordinates to figure out a rendezvous point, and afterward, it travels to that area. When the camera, located on the front, detects the landing target, the mode transitions to landing. While in the landing mode, the quadrotor flies towards the platform with a trajectory guiding it there. When the distance and relative velocity of the UAV-UGV are below threshold values, the quadrotor switches to the end state. Otherwise, if the last-known detection occurred over 0.8 seconds ago, it will go back to search mode. While in end mode, the quadrotor's motors will shut off, ending its maneuver.
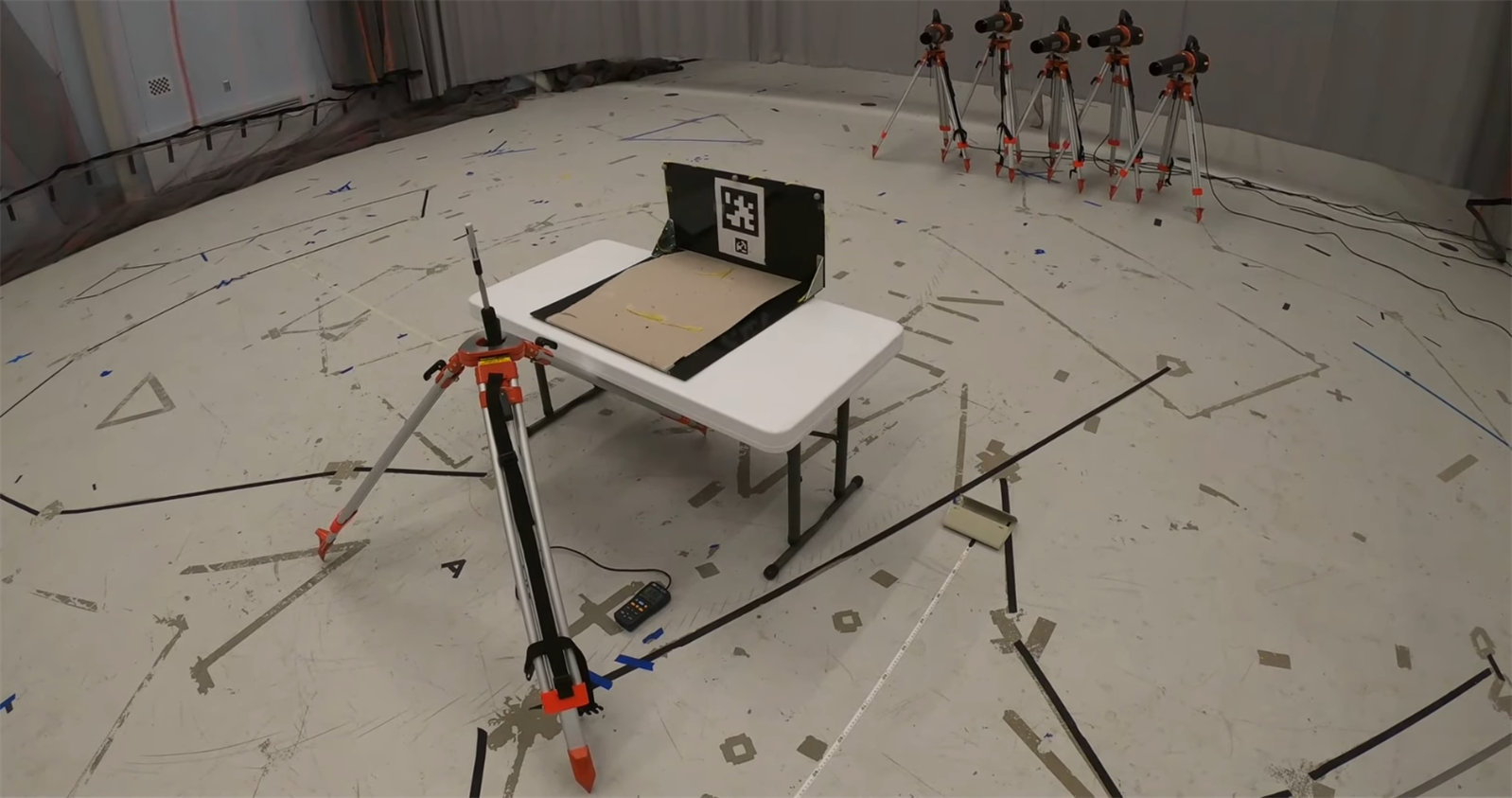
The researchers carried out experiments in a laboratory setting with five leaf blowers providing wind, a quadrotor, and a platform. There were significant tracking errors during their tests, which didn’t allow the quadrotor to land on the platform before the vehicle arrived at its destination. After continuous testing, they were able to land the quadrotor on top of the platform mounted on a dolly. In the future, the researchers will be modifying the system to include adaption for varied flight conditions and they will provide additional testing outdoors, attempting to land it in the back of a pick-up truck.
Have a story tip? Message me at: cabe(at)element14(dot)com
Top Comments