


Users can easily design a robotic hand through the researchers’ newly developed interactive pipeline. (Image Credit: MIT/ Lara Zlokapa)
It takes months for robot experts to design a custom manipulator. Iterations would need new parts designed and tested from scratch. Now, MIT researchers developed an interactive design pipeline that makes it easier to create a customized robotic hand featuring tactile sensors.
Robot designers can utilize the new interface to create a 3D-printed robotic manipulator from modular components that may be manufactured. Afterward, users can fine-tune the hand’s fingers and palm, allowing it to perform specific tasks. They then add tactile sensors in the final design. Once complete, the software produces machine knitting and 3D printed files to manufacture the manipulator. The sensors, which allow the manipulator to utilize tools or pick up delicate objects, are fitted in a robotic glove covering the hand.
Before starting the pipeline work, lead author Lara Zlokapa had to think about modularity. She wanted to make it possible for users to mix and match components without overwhelming them with varying options. Taking component functions into account, she discovered 15 parts that work together to create trillions of unique manipulators.
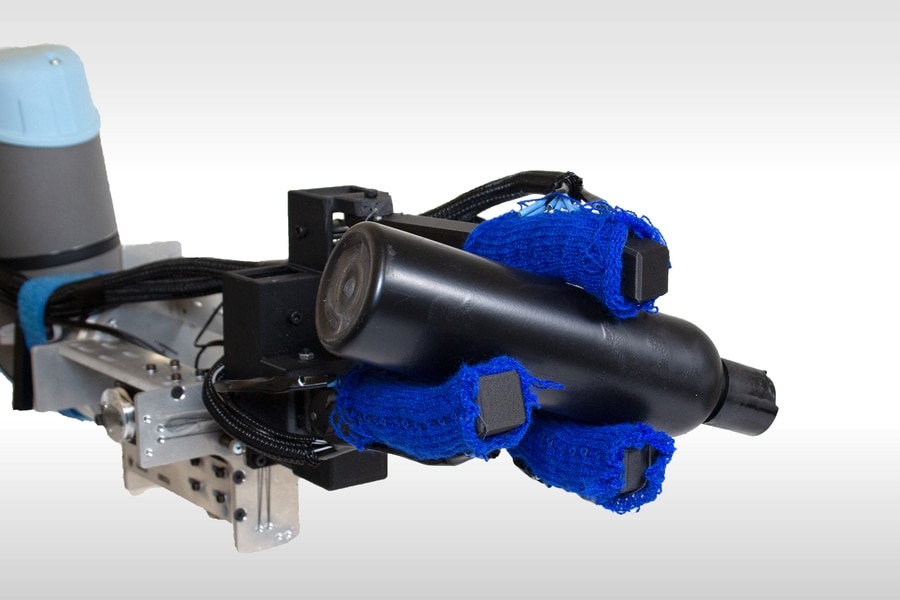
Afterward, the team created an interface that allows a user to mix and match components in a 3D space. Graph grammar rules provide controllability over how pieces can be combined based on how components, including a finger shaft or joint, fit. After forming the structure, the user can deform components to customize it for tasks. In this case, a manipulator may require fingers with slim tips for scissors or curved fingers to grip bottles. A digital cage surrounds the component during this process. Users can bend or stretch each component by dragging a cage’s corners. Then, the system restrains the components to properly fit the pieces together while ensuring the final design can be manufactured.
The user pinpoints where to place the tactile sensor in the knitted glove, which is made of two fabric layers. One has horizontal piezoelectric fibers that generate an electric signal when it’s squeezed, while the other contains vertical fibers. Tactile sensors are created where the horizontal and vertical piezoelectric fibers intersect. This converts pressure into measurable electric signals.
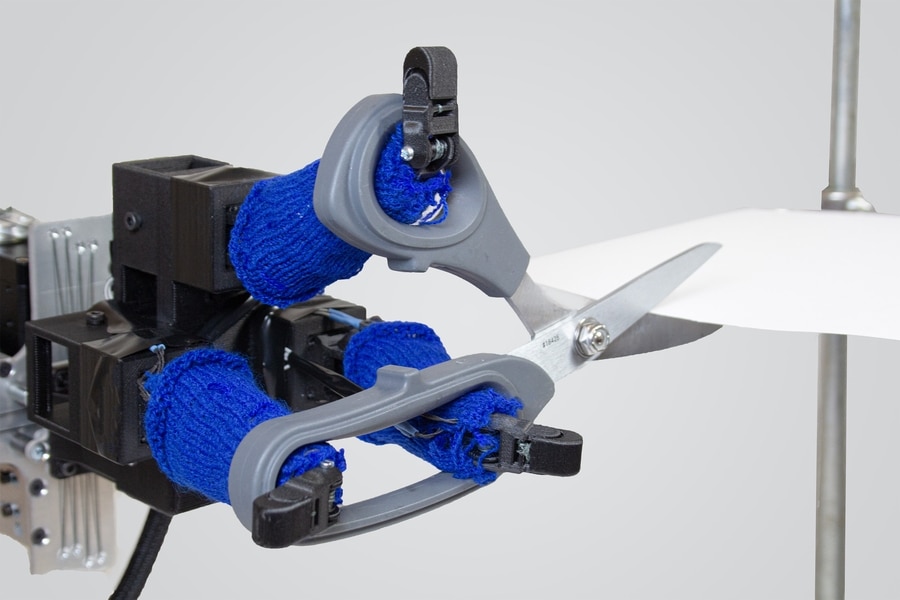
The team’s system allows a user to tailor the manipulator for a specific task, such as cutting paper. (Image Credit: Lara Zlokapa)
The team developed custom manipulators for four different tasks, which include picking up an egg, pouring water from a bottle, screwing in a wing nut, and using scissors to cut paper. The wing nut manipulator featured one offset and lengthened finger. This design kept the finger from colliding with the nut while turning. The egg-grasping manipulator successfully kept the egg whole. Meanwhile, the paper-cutting manipulator could use various scissors compared to other robotic hands.
While testing the manipulators, the team discovered that the sensors generate noise due to the knitted fibers’ uneven weave, limiting their accuracy. So the researchers are developing reliable sensors to enhance the manipulator’s performance. Additionally, the team plans to look into more automation. The graph grammar rules are written for the computer to understand them. Algorithms can search the design space to determine the best configurations for a robotic hand performing specific tasks.
Have a story tip? Message me at: http://twitter.com/Cabe_Atwell