


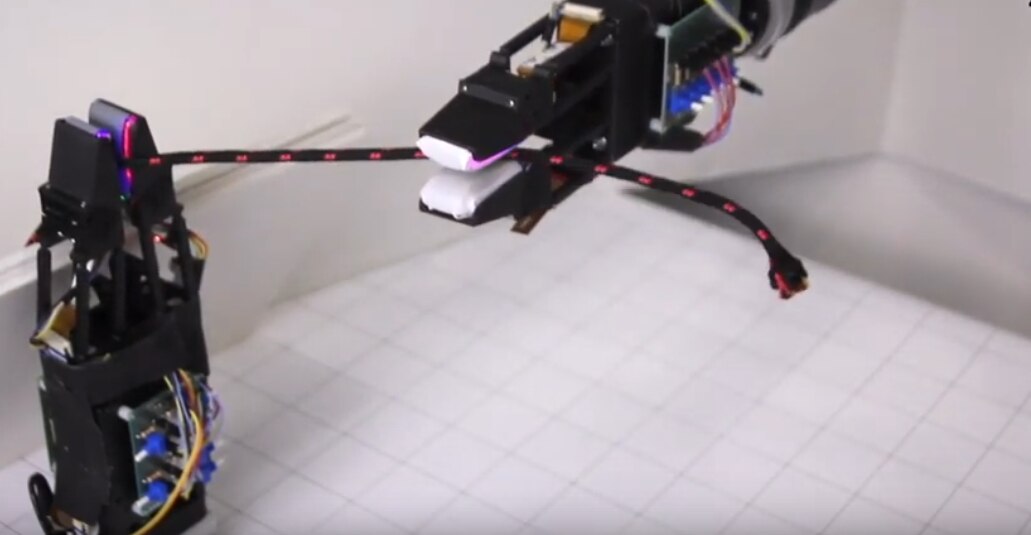
The robot gripper can grip a cable and slide it through from one end to the other. (Image Credit: MIT, CSAIL)
Up until now, you wouldn’t normally see robots gripping a USB cable and following it through from one end to the other like humans do when straightening it out. Researchers from MIT have developed a robot gripper that can determine the pose of a cable and follow it from one end to the other.
The robot gripper relies on GelSight, a vision-based tactile sensor, to predict and handle the pose of the cable as well as the friction forces when sliding the cable from one end to the other. The behaviors of the cable following are broken down into two controllers, a cable grip controller and a cable pose controller. The cable grip controller involves a PD controller that’s coupled with a leaky integrator, which adjusts the gripping force to maintain acceptable friction levels. The cable pose controller uses an LQR controller to keep the cable centered and in position on the fingertips to ensure the cable doesn’t fall off.
The gripper also contains two other modules. The first module is a tactile-reactive gripper, which is fitted with GelSight-based tactile sensors, operating at a 60 Hz grip bandwidth control. The second module is tactile perception, which estimates the gripper’s pose of the cable in real-time, friction force pulling from the gripper, and the quality of the tactile imprints.
The team also collected 2,000 data points with just one cable by running numerous trajectories with different cable configurations.
Experiments were also carried out with the system using an LQR controller on five different cables. Each cable had different physical properties (materials, diameters, and stiffness). While experimenting, the team discovered the system can follow up to 98.2% of the length of the cable. The gripper performed exceptionally well while following a thin and stiff rubber USB cable, which is locally straight most of the time. However, the team also noticed the thin and light nylon rope cable required it to be grasped again. It was difficult to adjust the in-hand pose and follow the cable since the un-followed portion kept moving with the gripper, and the cable is extremely light.
According to the paper, the team hopes to explore other models and controllers, especially those with model-based reinforcement learning to improve accuracy on cable gripping dynamics.
Have a story tip? Message me at: cabe(at)element14(dot)com
-

dubbie
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

dubbie
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children