


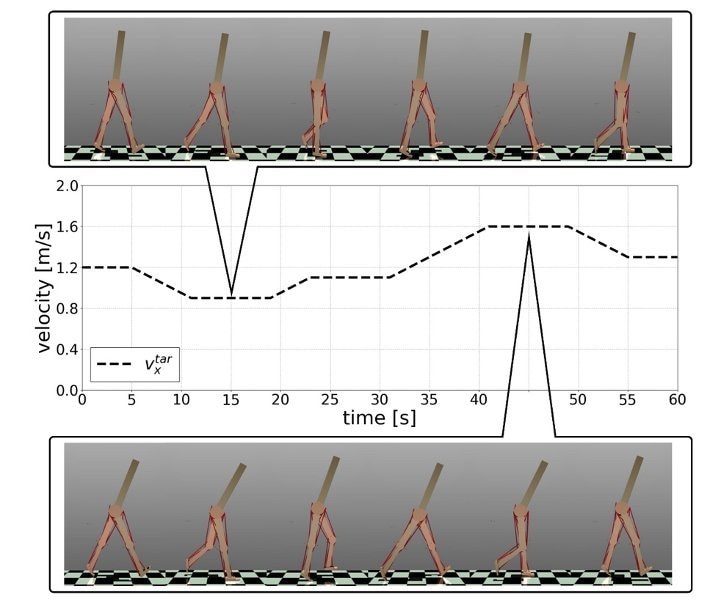
The team created a 2D musculoskeletal model that walks at varying speeds. (Image Credit: Tohoku University)
Tohoku University's Graduate School of Engineering researchers developed a 2D musculoskeletal model driven by a reflex control similar to a human's nervous system. The team says this walks the same speed as a human. With these biomechanics and robotics breakthroughs, scientists can understand human movement better while unlocking new robotics technologies.
As a whole, an innovative algorithm helped with this achievement. It evolved beyond the traditional least squares technique and assisted with creating a neural circuit model that's energy efficient across varying walking speeds. The neural circuit analysis showed important features of energy-saving walking strategies. As a result, it provides better insights into the complex neural network mechanisms underpinning human gait and its effectiveness.
The team used the MuJoCo simulation environment to build the musculoskeletal model, which has nine internal degrees of freedom. It features a torso, hip, two thighs, two knees, two shanks, two feet, and two sets of toes. All the model's motions have been constrained to the sagittal plane. Additionally, the robot's legs have eight muscle actuators reflecting the gluteal, hip flexor, vasti, tibialis anterior, soleus, hamstring, rectus femoris, and gastrocnemius musculature.
This musculoskeletal model has actuators used for simulating biological muscle actions that generate torque in the joints. The muscle actuator model consists of an inelastic tendon and a muscle to contract the tendon.
The reflex-based controller integrates control laws that adjust the target hip joint angle and fix the hip and knee joints for the hip strike. This allows it to generate more robust gaits while managing unstable states as walking velocity transitions occur. Additionally, the model maintains the biomechanical ability for gait adaption that might be lost due to simplification. The controller computes the muscle simulation for each muscle by incorporating time delay as input. Control law changes if the leg is in the stance or swing phase.
They also believe this could pave the way toward technological advancements. "The successful emulation of variable-speed walking in a musculoskeletal model, combined with sophisticated neural circuitry, marks a pivotal advancement in merging neuroscience, biomechanics, and robotics. It will revolutionize the design and development of high-performance bipedal robots, advanced prosthetic limbs, and state-of-the-art- powered exoskeletons," says Owaki. People with mobile disabilities could take advantage of this technology.
The team envisions improving the reflex control framework so that it has additional human walking speeds and movements. They hope to develop more energy-efficient and adaptive prosthetics, powered suits, and bipedal robots by implementing the study's algorithms and insights. Doing so involves installing the neural circuits into those applications to enhance the functionality and natural movement.

Boston Dynamics' Atlas robot also walks like a human. (Image Credit: Boston Dynamics)
Boston Dynamics' Atlas robot also walks like a human. Initially, the Institute for Human and Machine Cognition (IHMC) worked on this humanoid, improving its capabilities in the best way possible. It built a system allowing the robot to navigate on all sorts of different surfaces with varying geometries and sizes, like mason blocks set at an angle, for example. That algorithm helped Atlas set foot in the right places and gave it a strong foothold. The humanoid's upper body supports this process via angular momentum as it takes some challenging steps.
Later on, IHMC enhanced Atlas' walking ability by giving it a better gait that makes the robot more versatile and able to walk on rough terrain. To do this, the institute built a body control framework and adjusted the controller so that the robot's legs ended up straighter without applying force on the ground. IHMC didn't need to program this because the controller devised it as the robot walked and maintained its straight legs. During real-world testing, Atlas walked across the terrain and kept its legs straight after a mild shove.
The robot features 28 hydraulic actuators (each leg and arm has six, the back joints have three, and the neck pitch has one.) The walking, ladder, rough terrain, full body manipulation, and climbing controllers are targeted for it. High-level motions, including swing foot trajectories, are generated via quintic splines. Any footstep location is a knot point for the splines.
Have a story tip? Message me at: http://twitter.com/Cabe_Atwell