


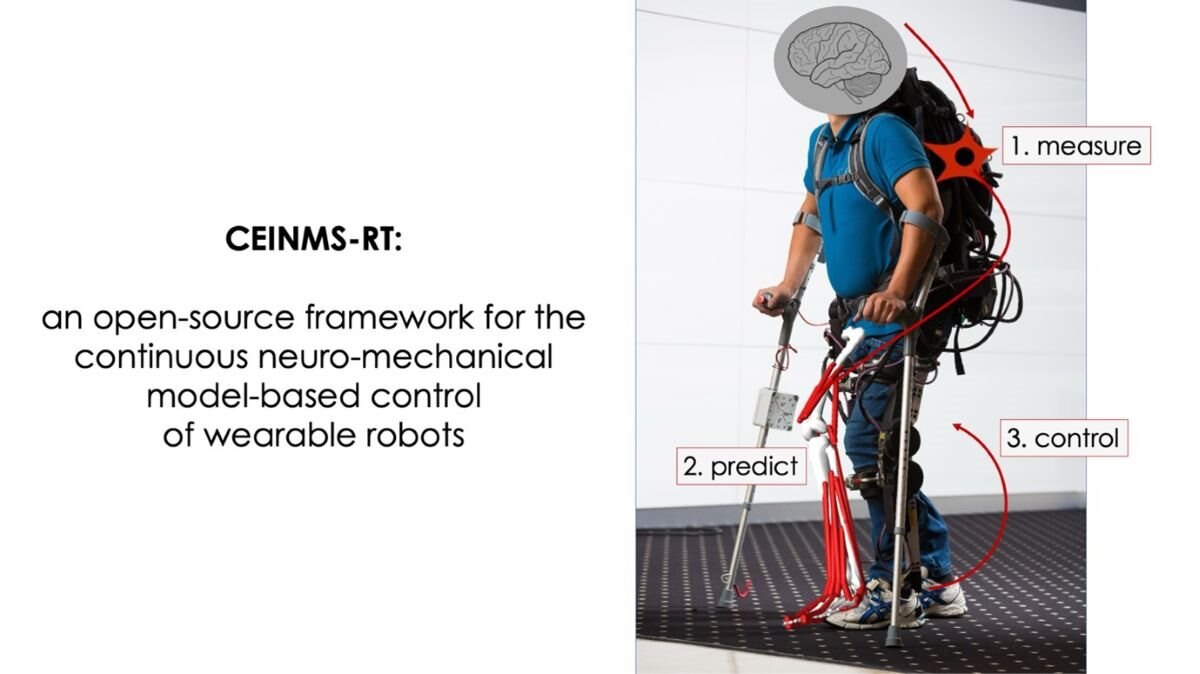
The innovative framework takes advantage of movement-assistive robots designed to aid mobility-impaired individuals and enhance the performance of athletes. (Image credit: University of Twente)
Researchers from the University of Twente (Netherlands), Griffith University (Australia) and McGill University (Canada) have developed an open-source framework designed to take advantage of movement-assistive robots to help mobility-impaired individuals and enhance athletic performance. The CEINMS-RT (Calibrated EMG-informed Neuromusculoskeletal Modeling Software — Real-Time) framework allows for real-time, neuro-mechanical model-based control for movement-assistive robots, including exoskeletons, exosuits, and bionic limbs, providing the potential for advancements in rehabilitation and movement augmentation.
CEINMS-RT is set to address significant challenges in wearable robotics by bridging the gap between human intent and robotic actions. Traditional exo-robotic hardware often relies on proprietary systems or predefined control schemes that limit adaptability and accessibility, meaning one size doesn't always fit all. Couple that notion with the fact that robotic assistive technology, as it is today, is expensive and unavailable to a good portion of people who would benefit from it.
In contrast, CEINMS-RT provides a freely available, open-source alternative that allows anyone, including researchers and developers, to take advantage of personalized, task-agnostic control strategies. CEINMS-RT functions by garnering real-time electromyography (EMG) data and biomechanical modeling to provide precision estimates of muscle activation, muscle-tendon force, and joint dynamics. That increased level of detail helps engineers and roboticists to develop wearable robots that operate as a natural extension of the wearer's body, adapting to their tasks and movements.
According to the researchers, CEINMS-RT has already demonstrated its potential in various scenarios. Initial clinical trials showed that patients with neurological impairments who participated in the study successfully regained voluntary control of their limbs using robotic exoskeletons driven by the platform. Another example enabled real-time biofeedback for personalized rehabilitation, optimizing muscle and joint loading to prevent injuries and enhance recovery outcomes. What's more, the platform was utilized to create adaptive control systems for back-support exosuits, reducing spine loads while performing heavy lifting tasks, as well as bionic limbs that allowed users to gain natural movement.
The researchers hope their CEINMS-RT platform will incentivize engineers and medical professionals to join a growing community that's dedicated to advancing HMIs. They also state that future revisions will integrate enhanced capabilities, such as muscle fatigue modeling and joint stiffness estimation, opening up doors for additional applications. Those interested can download the platform from the researchers' GitHub page.
Have a story tip? Message me at: http://twitter.com/Cabe_Atwell
-

Cliffyd43
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

Cliffyd43
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children