


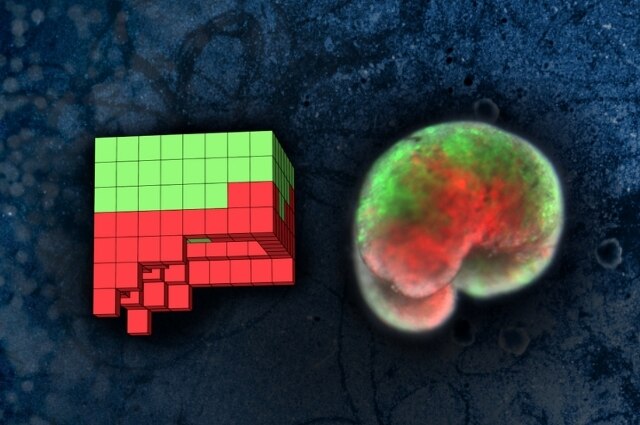
Computer simulated model of the Xenobot on the left with the actual organism on the right. The inert endothelial cells are in green, and the contracting heart cells are in red. (Image Credit: Sam Kriegman, University of Vermont)
Artificial intelligence and molecular biology have come together to create a one-of-a-kind biological robot. Scientists at the University of Vermont and Tufts have developed miniature living robots, called Xenobots, which were grown from the embryo cells of the frog Xenopus laevis. The pre-programmed biological organisms can carry out specific tasks, paving the way for future projects involving living machinery.
Douglas Blackiston, a biologist, pointed to one Xenobot that was slightly wider than a human hair. You could tell it was moving if you squinted, but under a microscope, it jolted around. Dr. Blackiston also stated that this life-form was a lighter color.
These Xenobots do not have any stomachs, brains, nervous systems, or even reproductive organs. Instead, the one being observed under a microscope is made up of approximately 2,000 living skin cells from a frog’s embryo. Larger specimen, which was smaller than a millimeter wide, contains skin cells and heart muscle cells that began pulsing by the end of the day.
The Xenobot is made up of 2,000 living skin cells of a frog’s embryo and does not include any major or reproductive organs. (Image Credit: University of Vermont, YouTube)
A Xenobot has a short lifespan, lasting only seven days, consuming tiny yolk platelets that make up its cells, which are usually what fuels the development of the embryo. Since its entire structure is made of living cells, it can heal itself from injury, even after being nearly cut in half. What it does when it’s alive is not determined by its non-genetically modified DNA, but rather, by its physical appearance.
These biological marvels come in varying shapes and sizes designed by roboticists in computer simulations, utilizing physics engines similar to the ones used in video games like Minecraft and Fortnite. The specimens with a fork or snowplow-like appendage in the front are capable of sweeping up stray particles during the night and piling them in one spot. Others use legs of a sort to shuffle around the floor of the petri dish. Some could even swim, using beating cilia, or link their appendages and circle each other before separating in different directions.
At the University of Vermont, Sam Kriegman, a graduate student, and his advisor, Joshua Bongard, created virtual worlds that would reward specific behaviors. The first one was walking, where an algorithm produced random body designs. Some didn’t move at all, while others either waddled forward or rocked back and forth. Afterward, the algorithm proceeded to allow the best walkers to procreate into the next generation. Then, another generation was created, and so forth, each one improving on their designs. A different simulation became crowded with donut-like bodies that evolved to carry an object in the central cavity.
After experimenting for a day, they produced body shapes that were preprogrammed to execute the specific tasks. Afterward, the Vermont team conveyed their results to Dr. Levin and Dr. Blackiston, who began creating cellular figurines that represented those designs. They started with skin cells then progressed towards cardiac tissue, which can contract and expand. The Tufts team provided feedback to improve the next round of simulations, making them better at predicting what happens in a petri dish.
In their paper, the team suggested that these Xenobots could one day clean up microplastics in the ocean, deliver drugs to a tumor, or clear up plaque from our arteries. After using up the yolk in their cells, the tiny artificial organisms would biodegrade. Whatever their purpose is, their evolved bodies can encourage the right behavior in the target environment.
Have a story tip? Message me at: cabe(at)element14(dot)com

