


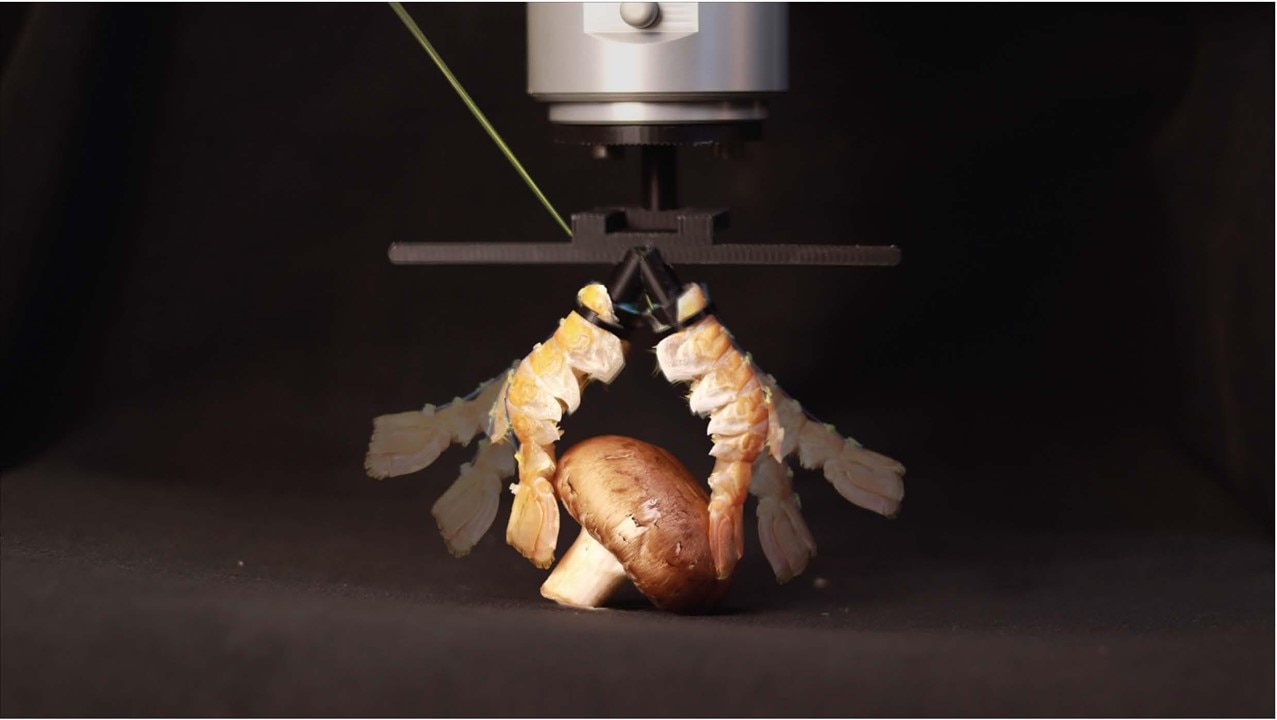
The researchers repurposed langoustine tails into a robotic gripper that can handle delicate objects like a mushroom. (Image Credit: EPFL)
Nature has always been a great source of inspiration in robotics. Some bio-inspired machines are, however, unusual. Researchers at EPFL’s CREATE lab repurposed discarded langoustine abdomen exoskeletons from food waste into structural and mechanical components in bio-hybrid actuators. These segments are made of chitin fibers embedded in a mineralized matrix and arranged into a chain of curved, interlocking shells optimized for bending.
The team needed to prepare the material via chemical and mechanical methods. First, they removed the residual soft tissue before dissolving it using gentle cleaning methods that keep the micro-scale fiber structure intact. All segments were degreased with ethanol washes to enhance bonding with synthetic actuators before controlled low-temperature drying to prevent deformation.
Afterward, the team used characterization tools to analyze the processed exoskeletons. For instance, micro-CT scanning provided 3D visuals of the internal hinge geometry. Scanning electron microscopy (SEM) produced high-resolution images of the chitin fiber networks. Force-displacement mechanical tests measured stiffness, yield behavior, and elastic recoil. Lastly, thermal analysis revealed the effects of drying and environment on mechanical stability.
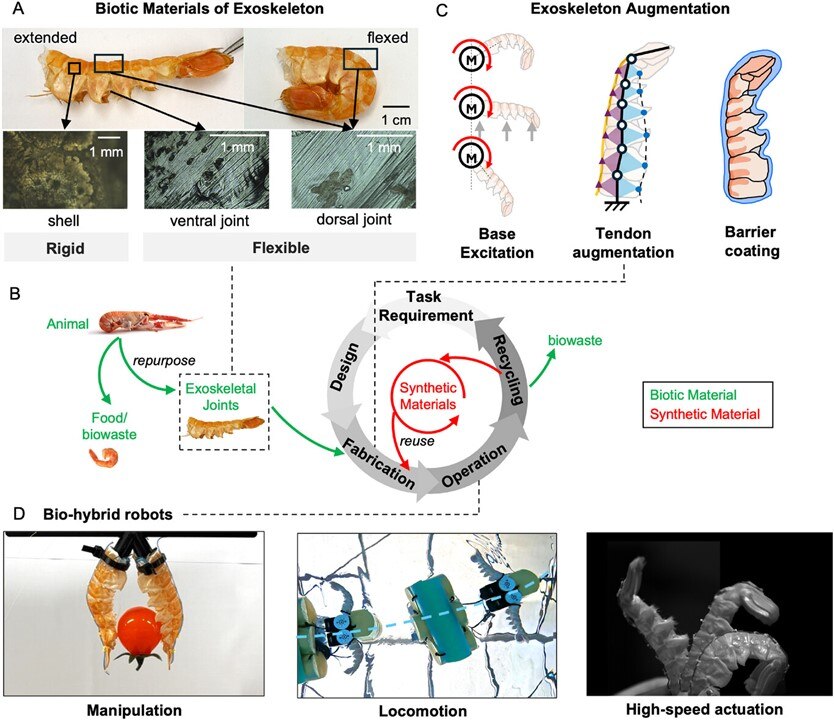
Bio-hybrid robotics repurposes nature’s joints, rigid/flexible exoskeletons, passive actuations, and coatings for manipulators, locomotion, and actuators. (Image Credit: Advanced Science)
The researchers made actuators out of those biological structures by coupling them with pneumatic components. They created silicone elastomer bladders to match the abdominal segments' curvature. Applying pressure on the bladders causes asymmetrical expansion, putting force on the chitin shells, making them bend, curl, or twist. The pneumatic system features flexible tubing, pressure-regulated air pumps, and electrically controlled micro-valves or solenoid valves driven by a microcontroller. Those components enable precise airflow and pressure control to achieve multi-axis actuation across different segments. Since the biological hinge has passive elastic recoil, the actuators only needed low pressure and went back to their original shape without extra mechanical springs.
Overall, the bio-hybrid exhibited impressive performance. All segments demonstrated large bending angles (>90°) at modest pressures (20-40 kPa), lifting >200x their weight (3g segment lifted 680g). This showed its efficient pneumatic input conversion into motion. They also underwent repetitive cycling, in which the exoskeleton withstood >1,000 actuation cycles with minimal degradation (<5% stiffness loss). However, the synthetic interface experienced some damage rather than the biological material. The crustacean segments had superior stiffness-to-weight ratios and improved elastic recovery compared to synthetic flexure hinges of the same size.
The researchers developed robotic prototypes showing the bio-hybrid’s versatility. They used 3D printing mounting hubs to assemble a three-segment gripper operating at 8 Hz. Pressurizing it via independent pneumatic lines caused the segments to curl inward, enabling the gripper to conform around irregular objects and perform delicate gripping tasks. A larger, multi-segment manipulator achieved more complex motion, such as serpentine bending through coordinated actuation of multiple silicone bladders. The team also created a swimming robot, which generated propulsion similar to a crustacean tail flick in water, by mounting sequential segments and actuations onto a lightweight frame. For the aquatic experiments, they used a tank equipped with flow-tracking sensors to measure motion and thrust. The swimmer robot reached swimming speeds of 11cm/s.
Have a story tip? Message me here at element14.
