


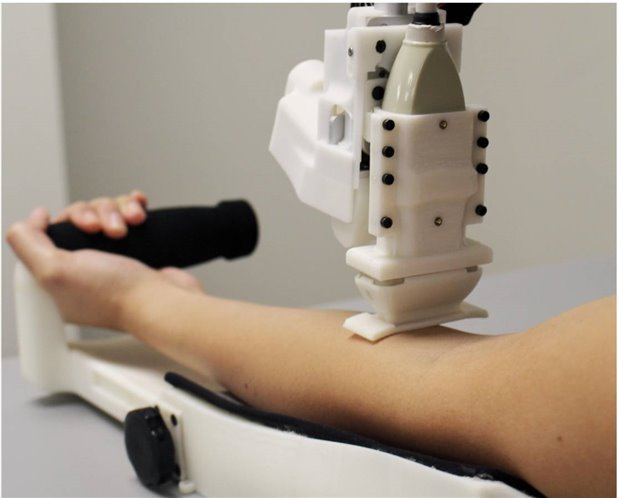
The device could help clinicians in the future when it comes to drawing blood from a vein that isn’t easily accessible. (Image Credit: Rutgers)
Getting blood work done in a healthcare setting can be an unpleasant experience, especially when it’s challenging to locate such a small vein. In the future, robots might be able to help with this experience. Researchers from Rutgers have developed an automated robot that seeks and punctures a vein to draw blood. The team published their findings in the journal Technology.
Equipped with an ultrasound probe, the robot prototype has already successfully carried out its first human clinical trial on 31 patients with an overall success rate of 87%. For the 25 patients whose veins were easy to find and access, the success rate climbed up to 97%. “The device combines ultrasound imaging and miniaturized robotics to identify suitable vessels for cannulation and robotically guide an attached needle toward the lumen center,” the team wrote in their paper.
Venipuncture is the most common clinical procedure in the world, with over 1.4 billion being performed every year in the U.S. However, despite the common practice, some procedures don’t go as planned. Clinicians failed in 27% of attempts where the patient’s veins weren’t visible. The failure rate increases to 40% in patients who don’t have palpable veins and 60% in undernourished patients.
With multiple failure attempts to draw blood or start an IV, the risk of phlebitis, venous thrombosis, and secondary bacterial infections increase. If clinicians are still having trouble inserting an IV by using ultrasound probes, they resort to placing central venous catheters (CVCs) into large veins (internal jugular, subclavian or femoral veins), which is more costly and increases risk. It doesn’t just take longer to perform this procedure, but it also involves more staff, which raises costs to over $4 billion per year in the U.S.
“A device like ours could help clinicians get blood samples quickly, safely and reliably, preventing unnecessary complications and pain in patients from multiple needle insertion attempts,” said Josh Leipheimer, a biomedical engineering Ph.D. student in the Yarmush lab in the School of Engineering at Rutgers University, New Brunswick.
The team will be attempting to add a feature to the robot that will “auto-align the needles trajectory path with the underlying vessel.” Implementing this to the robot would improve its functionality since the clinician wouldn’t have to align the device over the targeted vein manually. Adding this feature would require more work for scientists.
With such refinements, automated robots may soon have the ability to place intravenous catheters, central venous catheters, arterial lines, or even perform endovascular therapy.
Have a story tip? Message me at: cabe(at)element14(dot)com
Top Comments