



With bird-like qualities, the robotic claw can easily perch on tree branches. (Image Credit: Stanford University)
Biomimicry strikes again. Stanford University engineers developed a peregrine falcon-inspired robotic claw that attaches to a quadcopter drone, allowing it to perch on varying surfaces, grab objects, and take flight. The system, called SNAG (stereotyped nature-inspired aerial grasper), was used by the team to measure microclimate in an Oregon forest.
“It’s not easy to mimic how birds fly and perch,” said William Roderick, Ph.D. ’20, a researcher in the study. “After millions of years of evolution, they make takeoff and landing look so easy, even among all of the complexity and variability of the tree branches you would find in a forest.”
SNAG consists of a 3D-printed structure that serves as the bones. It also features motors in place of muscles and fishing lines that act like tendons. Each leg has two motors: one for grasping and the other to move back and forth. The robot’s leg contains a mechanism to absorb a landing impact and turn it into grasping force. As a result, the claw clutches onto its perch, snapping shut within 20 milliseconds. After the ankles lock, an accelerometer, placed on the right foot, documents the landing and triggers a balancing algorithm, which keeps the robot stabilized.
During the pandemic, Roderick set up a basement laboratory to perform controlled testing on the robot to see how it functions in different conditions. He placed SNAG atop a rail system, which launched on varying surfaces, predefined speeds, and orientations. Roderick also verified that the robot grasps objects thrown in the air, such as a corn hole bean bag, prey dummy, and tennis ball. Afterward, Roderick placed SNAG in a nearby forest for real-world trial runs. In the end, SNAG landed and grasped onto branches with varying thicknesses, textures, bumps, and offshoots. Roderick then integrated a temperature and humidity sensor, which recorded the microclimate.
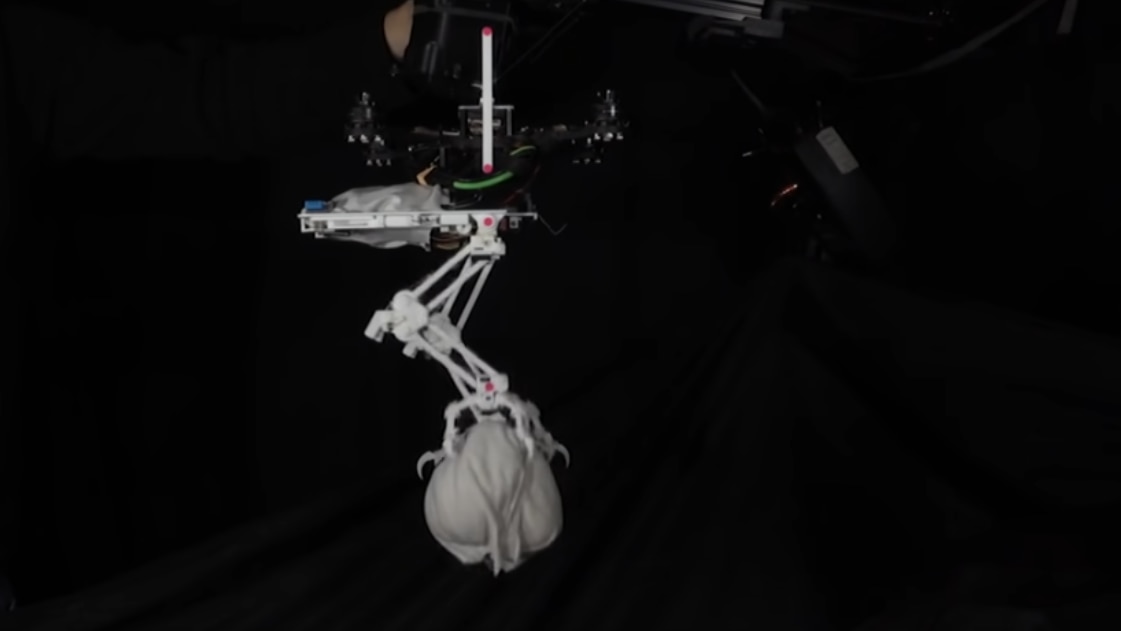
SNAG can grab objects thrown into the air, such as a corn hole bean bag. (Image Credit: Stanford University)
Overall, the robot could be used for many different applications, such as search and rescue and wildfire monitoring. It can also mount to other technologies apart from drones. The robot could provide insights into avian biology due to SNAG’s bird-like qualities. For instance, the team used two different toe arrangements on the robot: anisodactyl and zygodactyl. They discovered minimal performance differences between the two arrangements. Next, the team wants to improve the robot’s flight control and situational awareness.
“Part of the underlying motivation of this work was to create tools that we can use to study the natural world,” said Roderick. “If we could have a robot that could act like a bird, that could unlock completely new ways of studying the environment.”
Have a story tip? Message me at: http://twitter.com/Cabe_Atwell