



SORA-Q is a tiny round rover that navigates the moon. (Image Credit: Takara Tomy)
JAXA sent a mini round rover to the moon! On December 11th, SpaceX Falcon 9 rocket launched with Takara Tomy’s SORA-Q and iSpace’s Hakuto-R M1 lunar lander aboard. (You read that right, Takara Tomy, the company who gave us Transformers aka Diaclone) A second SORA-Q rover, hitching a ride aboard JAXA’s SLIM lander, is expected to set down on the lunar surface in 2023.
SORA-Q’s design was inspired by three toys: an Optimus Prime toy robot, a tiny remote-controlled humanoid bot called the i-Sobot, and a feline Zoid called Liger Zero, which relies on a battery to walk. In this iteration, the team decided against using legs due to their complexity and fragility, so they created a spherical shape instead. It looks more like a Star Wars droid, ideal for physics.
The M1 and slim missions will head to the moon on a months-long trajectory, consuming less fuel versus a direct flight. Different-sized rovers, including SORA-Q, will be ejected just before the landers reach the surface. It has a honeycomb aluminum-alloy shell, giving the rover a metallic ball-like appearance. Once it lands on the surface, SORA-Q unfolds, splitting in half, revealing two cameras while the hemispheres split and act as wheels. During M1, mission controllers remotely tell the rover to move toward the lunar lander, capturing and sending images to Earth.
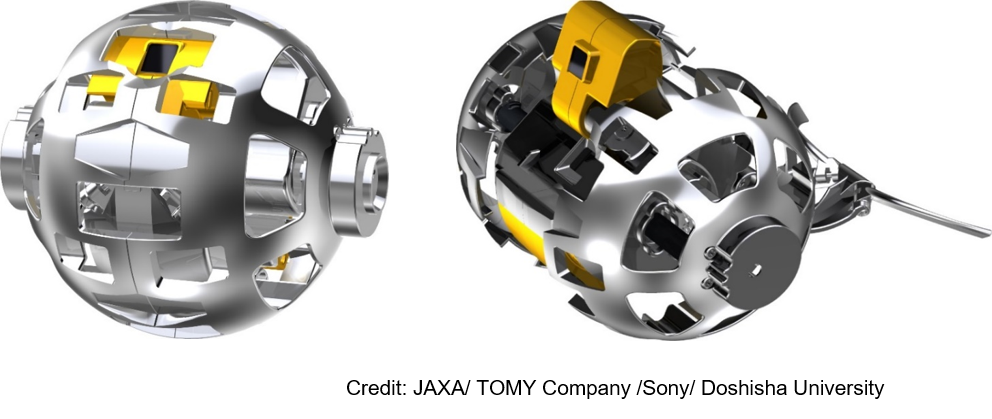
(Image Credit: JAXA/TOMY Company/Sony/Doshisha University)
It took six years to develop SORA-Q, which underwent constant revisions that involved testing out rough and non-slip exteriors until the team finally decided on holes. JAXA then developed a finalized version of the rover made of aerospace-grade aluminum and plastic. It features Sony-based mini electronics and optics. Overall, the materials and components meet the size, weight, and durability requirements for stress. This allows SORA-Q to survive launch g-forces and vibrations, landing impact, and extreme temperatures on the moon ranging from 250°F in the sun to -208°F during nighttime.
One of the prototypes at Takara Tomy headquarters showed its capabilities. After Kenta Hasibam pressed a button, the SORA-Q separated into two hemispheres connected by axles to a boxy core. The core had two cameras mounted on top with a curved metal tail designed to keep the sphere vertical while rolling around.
If both hemispheres simultaneously rotate, then the rover rolls straight. Each hemisphere rotating on its own allows the rover to maneuver around obstacles with an army crawl-like wiggle. The rover doesn’t look like the ones used for Mars and other lunar missions. Rather, it has an animal-like gait with its locomotion that ensures the rover won’t get stuck in the terrain.
SORA-Q is also equipped with a battery that provides power for up to two hours, but the rover will die once the energy is depleted. The robotic design could be for other purposes as well. The team wants to explore decentralized systems involving different-sized robots performing various tasks as a group, which could be suitable for the SORA-Q rover. SORA-Q is also helping promote space and science among children.
Have a story tip? Message me at: http://twitter.com/Cabe_Atwell
