



RoBeetle is the world’s lightest and smallest microbot that can run on alcohol to move forward. (Image Credit: University of Southern California)
Batteries usually power robots, but this can be problematic since they tend to have poor energy density. It can also be a bigger issue for small-scale robots. Researchers at the University of Southern California have developed RoBeetle, an 88-milligram robot that runs on methanol. It also uses a new type of actuator that acts as an artificial muscle, converting methanol vapor into forward motion.
The RoBeetle contains a box-like fuel tank that can be filled with methanol by jabbing a syringe through a fuel inlet hole. It also has two joint active front legs and two fixed hind legs connected to a transmission that moves them simultaneously in a rocking forward motion. This is then followed by a backward and down motion. The transmission is attached to a leaf spring that pulls the legs backward through tension. This allows the spring and transmission to keep the front legs vertical when the robot isn’t being actuated, which enables it to stand. The horns, which have hooks to carry objects, hold the leaf spring in place.
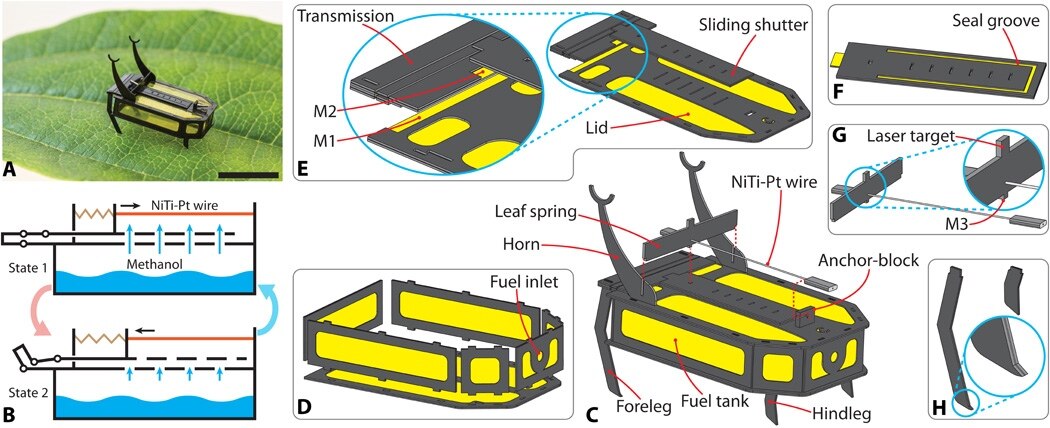
The illustration shows the design of RoboBeetle. (Image Credit: Science Robotics)
The actuator is a nickel-titanium shape-memory alloy wire coated in a platinum powder that causes the methanol vapor to burn more quickly. This generates heat, causing the wire in the robot’s legs to contract, and when it cools down, the wire extends. As a result, it causes the microbot to move.
One end of the SMA wire is connected to the middle of the leaf spring, and the other end runs above the robot’s back. The SMA wire is short enough for the leaf spring to pull back, which jolts the legs forward and up. The final component of the robot is the sliding vent. It’s attached to the transmission, allowing the vent to open when the SMA wire is cold, and the leaf spring gets pulled back. It closes when the SMA wire warms up, and the leaf spring is relaxed
The actuation cycle that causes the robot to walk starts with a full fuel tank and a cold SMA wire. Tension on the leaf spring causes the transmission to pull back, which results in the legs rocking forward and upward. Additionally, the transmission pulls the sliding vent open, and from there, methanol vapor escapes from the fuel tank and into the air. Afterward, it floats past the SMA wire that runs above the vent.
Environmental factors such as a gentle breeze can improve the robot’s speed. This is due to the quicker cool-down effect from the air moving above the SMA wire. It also blows away residual methane surrounding the vents, which helps to stop the reaction. RoBeetle can haul objects up to 2.6 times its own weight, and it can carry 95 milligrams of fuel, which takes 155 minutes for it to completely evaporate from the tank. It can also climb slopes and navigate on surfaces with different textures such as a concrete sidewalk, glass, and a foam sleeping pad.
However, RoBeetle has some limitations. It can’t steer or move backward, and its speed can’t be adjusted. Not only that, but it only stops walking if it either breaks or runs out of fuel. The team notes that increasing the speed of fuel delivery by using propane or butane could enhance the actuator output frequency. Additionally, the SMAs frequency, amplitude, and efficiency can be significantly increased by “arranging multiple fiber-like thin artificial muscles in hierarchical configurations similar to those observed in sarcomere-based animal muscle.”
Have a story tip? Message me at: cabe(at)element14(dot)com