


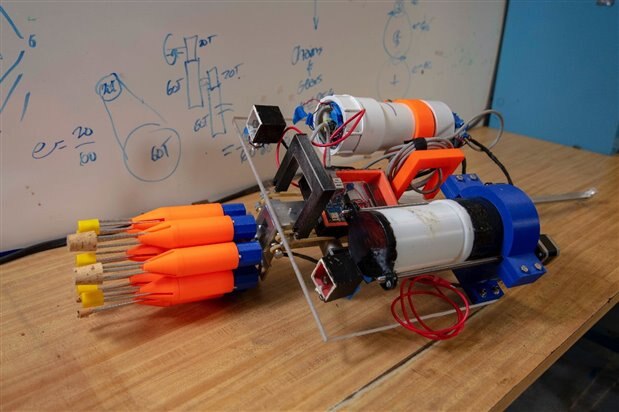
WPI’s robot uses computer vision to identify lionfish and jabs them with buoyant spears, which float the fish to the surface to be harvested by fishermen. (Image credit: WPI)
Lionfish are a venomous species of the Pterois genus native to the Indo-Pacific region of the Pacific Ocean. Besides being venomous, they are also an invasive species that are threatening coral reefs and marine ecosystems in areas the shouldn’t be, such as the Caribbean and the east coast of the US. Lionfish have enormous appetites and are capable of decimating local fish populations, and the females of the species can lay up to 30,000 eggs every four days.
To help eliminate the invasive fish, engineers from the Worcester Polytechnic Institute are developing an autonomous underwater robot designed to hunt and harvest the lionfish, in an effort to help balance those marine ecosystems.
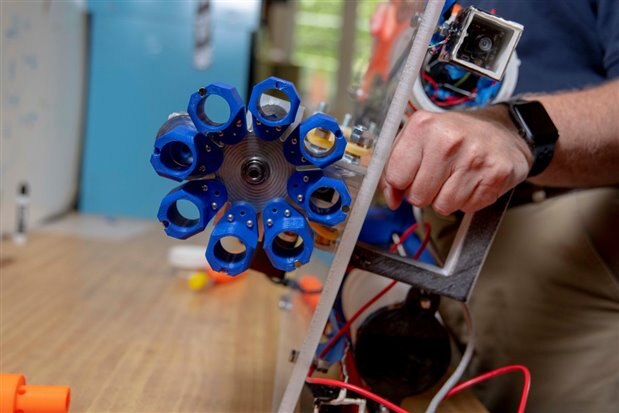
The robot’s spear carousel mechanism moves spear tips into position and impales the fish using a metal shaft. (Image credit: WPI)
The robot is outfitted with a pair of cameras to navigate and locate the lionfish autonomously, which is done using a TensorFlow neural network. The engineers showed the system thousands of different photos of lionfish at various angles and lighting conditions for the robot to recognize the fish out of many different species and found it has an accuracy rate higher than 95%. They also displayed images of what the robot must never attack, such as human divers and other marine life.
For the robot’s spearing system, the engineers created a platform that acts like a revolver- a revolving carousel that holds eight detachable buoyant spear tips. When fired, the spears are thrust into the fish using a metal shaft propelled by an internal motor. When the rod retracts, the carousel moves the next tip into place. As each spear is used, the robot loses buoyancy. To compensate, the engineers designed watertight chambers that fill with a certain amount of air after each spear is deployed.
Speared fish float to the surface of the water, which fisherman can then harvest and bring to fine dining restaurants in local communities. While the autonomous robot is still under development, the engineers are designing the platform to attach to commercially available submersibles that work in tandem to cover large areas.
Have a story tip? Message me at: cabe(at)element14(dot)com