

Photoelectric sensors that only detect the presence or absence of an object may not be appropriate for every application. As a result, a variety of distance-based photoelectric sensors have been developed to address more challenging application requirements. Distance-based photoelectric sensors not only determine the presence of an object, they also determine its position. Three methods have emerged as front-runners of distance-based photoelectric sensing, which will be covered in this blog.
Background suppression (BGS)
The oldest and simplest method is called background suppression, or BGS. BGS sensors detect based on the triangulation of light that is reflected from an object back to the sensor’s receiver. Light from the sensor is reflected at different angles based on the distance the object is from the sensor. When something is close to the sensor, the angle is larger than when something is farther away. And because the angle of the reflected light changes, it results in the light reaching different parts of the sensor’s receiver.
Multipixel array (MPA)
While BGS has been in existence for several decades, a newer technology has emerged as an outgrowth of BGS. Multipixel array (or MPA) products are based on a variation of BGS technology. In both BGS and MPA photoelectricsensors, the sensor emits light, which is reflected by an object back to the sensor’s light-sensitive receiver area. And the triangulation of that reflected light determines where it contacts the receiver, which is then used to determine distance. But the difference between the two is that a BGS sensor uses two receiver elements, while an MPA sensor uses more than that number of receiver elements, often over 100 receiver elements per array.
One sensing threshold is set for a BGS sensor. The threshold is determined by the distance at which more of the reflected light begins to fall on the “near” element receiver rather than the “far” element receiver. However, in an MPA sensor, the distance-based sensing is determined by where on the receiver array the majority of the reflected light is centered. With MPA sensors, multiple switching thresholds or windows are possible for more complex application requirements. MPA also offers a higher level of control and configuration than BGS models because there are more configuration options available. Unlike BGS with just one distance threshold, now it is possible to set multiple simultaneous thresholds or even sensing windows with user-defined minimum and maximum sensing distances. Because both BGS and MPA sensors detect where light is reflected instead of how much light is reflected—as is the case with conventional sensors—they are also remarkably insensitive to variations of objects’ reflectivity or color.
Pulse Ranging Technology (PRT)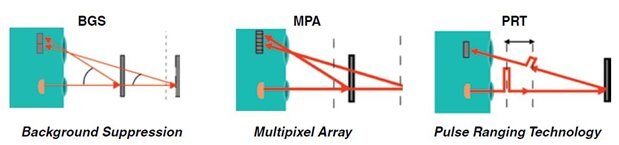
Pulse Ranging Technology (PRT) sensors are either diffuse, meaning they emit light that is reflected from the object to be sensed back to the sensor’s receiver, or retro-reflective, meaning they emit light that is reflected from a corner-cube reflector back to the sensor’s receiver. But unlike the previous two technologies, PRT technology uses only one receiver element. A timer in the sensor determines how long it takes—after it emits a short burst of light—for the light to make it from the sensor to the object and then be reflected back to the sensor again. Calculating this time duration and using the speed of light in air as a constant then determines the distance from the sensor to the object.
PRT is true “time of flight” (TOF) distance measurement. It is critical to note that the term “time of flight” is often misused in industry, as some manufacturers improperly use it to describe a different method of distance measurement that is more accurately called phase correlation or is chip-based technology. In phase correlation distance measurement, the reflected light is evaluated at the receiver, not based on the time it took to get from the sensor’s emitter to the object and be reflected back, but rather by how much the phase angle of the light shifted as it traveled to and from the object. In other words, phase correlation geometrically calculates the distance rather than accurately measuring it, as is the case with PRT.
But phase correlation distance measurement has significant disadvantages compared to PRT distance measurement. Phase correlation sensors have a weaker LED intensity since they are continuously on, resulting in shorter sensing distances and difficulty detecting dark objects. They are also limited to short sensing ranges because they detect shifts to the reflected light’s phase angle, but anything greater than 360° can be misinterpreted by the sensor. This also means they are prone to detecting background objects, especially those that reflect light at the same phase angle as light in the sensing range. For example, whether reflected light is shifted in phase by 90° or by 450°, there is no way for a phase correlation sensor to differentiate the two. This results in the detection of “phantom objects” in the background. Other strengths of PRT include its ability to ignore environmental conditions such as ambient light, temperature, and target color, and that measured values don’t drift as they do in phase correlation, even after prolonged use.
For more information on distance-based photoelectric sensors, please download the attached pdf by Pepperl + Fuchs, called "Technical Considerations for Selecting Distance-based Photoelectric Sensors," which was the source for this document.
| tdoctb0c2__eng.pdf | |
 | PEPPERL+FUCHS 3RG7404-7CH00-PF PHOTO SENSOR.pdf |
