


Any motor control solution requires a more or less precise measurement of the phase currents. Especially sensorless motor drives for three phase motors rely heavily on accurate measurement results. The easiest and hence most common method to measure this current is by using a shunt resistor on the low side of the phase leg of the inverter bridge.
When you are choosing the op amp you have the challenge to find the right part for your application. This can be difficult especially if you don’t know exactly which parameters are most relevant. Generally you will look for an optimized solution which gives you the needed performance for a reasonable price. This blog shall help you to find the most suitable op amps for current measurement in motor control applications.
We will discuss some of the cost driving op amps specifications and explain which ones are important and which ones are not.
Offset Voltage:
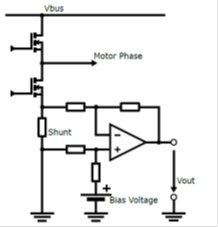
If you have designed your system like shown above, you define your 0 A level at a Voltage of approximately 1.65V to be able to measure currents which flow in both directions through the shunt. A static offset voltage of several mV would highly distort the result. This issue can be solved by using a software initialization process which measures the shunt voltage at a known 0 A condition. This makes the offset voltage specification irrelevant and saves also cost on the voltage reference source for the bias voltage since you also do not require highest precision here.
Temperature Drift:
Unlike the issue with offset voltage which can be solved by a software workaround, there is no way to compensate temperature drift. The temperature drift needs to be as low as possible and you should also consider this effect when designing the printed circuit board (PCB) of the drive. Power elements which heat up during operation should be kept separated from the signal chain.
Noise:
As you may assume, noise does not play a big role at shunt current measurements because:
- The amplification of the circuit is not very high, about 10x or 20x
- The measured signal has a low frequency which enables us to limit the bandwidth
- Other components in the circuit create more noise on the signal chain than the intrinsic op amp noise
However, the influence of noise may be important in certain amplifier configurations. To get an idea about the magnitude of its influence, let’s evaluate the example of amplifier configuration shown above with an amplification of 20x.
To simplify the analysis, only the voltage noise from the amplifier is considered, since it adds the most significant amount of noise here if the resistor values are chosen reasonably low. In the following chart the peak to peak noise voltage on the output is shown over the gain-bandwidth product of the op amp. The different curves show different voltage noise specification.

The dotted lines show the levels of digits of a 12 bit ADC conversion at 3.3V reference to depict the influence of the specification on the conversion result. You can see that the peak to peak noise can span several digits. Moreover a more expensive op amp with a high gain bandwidth (GBW) can even show a worse performance here.
GBW & Slew Rate:
The current through the motor winding can only be measured in a low side current shunt configuration if the low side FET of the half bridge is closed. The effect of this is that the amplifier will see a pulsating voltage signal at pulse-width modulation (PWM) frequency. The amplifiers output needs to be able to follow the signal in a very short amount of time. As the modulation index increases the timeframe to measure the current signal is shrinking.

The slew rate gives an indication how quickly the amplifier can respond to the pulsating input signal.
In three phase inverters it is possible to measure only one shunt current and calculate the three phase currents. However, in this one shunt configuration the op amp will require a very high slew rate to be able to provide reliable results at all time. When you are using three shunts, you are able to calculate a blanked-out current signal from the other two resulting in reduced requirements to the slew rate.
To give some indication about the magnitude of the slew rate see the table below. This table shows the slew rate recommendation for the sensorless motor operation with our InstaSpin software (refer to spruhj1, chapter 17).
Shunts | Slew Rate |
1 | >20 V/us |
2 | >6 V/us |
3 | >1 V/us |
A high bandwidth is not required since we are measuring typically single digit kHz current signals. It can also have a negative effect because the amplifier will collect and amplify more broadband and resistor noise. Furthermore it can also cause ringing on the output signal. On the other hand, a too small signal bandwidth can result in an increased settling time (t_settle).
Configuring the product search on the TI.com with the explained specification, you will find the OPA171 in the portfolio. This device enables to design very accurate shunt current amplifiers without extra cost for unnecessary features.

That was were my criteria to find an optimized solution. Please let me know what you think!
BR SimonJ