


Traditionally if you wanted a robot to be able to move about in a controlled manner, you would build a drivetrain of some sort that comprised of very specific parts that were designed to do a very specific task. As robots continue to get smaller and smaller every year, engineers are constantly having to devise new methods to give these small robots precise and stable motion. A group of researchers from the Georgia Institute of Technology and Northwestern University has come up with what could be a solution to this issue with a bit of out-of-the-box, or rather, inside-the-ring thinking. Using a group of small, very simple robots called “smarticles” to collectively form a larger robot, they inadvertently work together to move the collective whole around a surface.
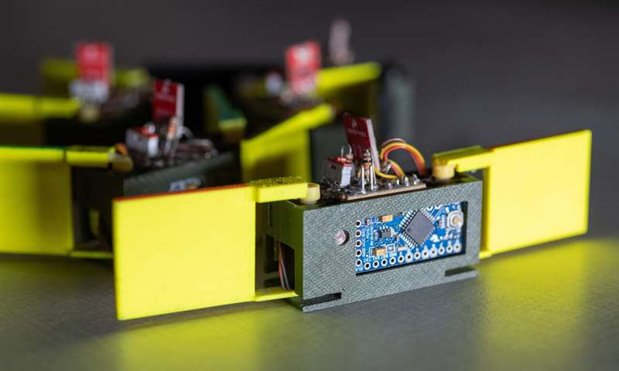
Photo: Georgia Institute of Technology
Smart Active Particles or “smarticle” is a small 3D printed robot that has two wing-like arms that are flipped back and forth by servos connected to a small controller board. That’s it, that’s all they do, they just flap their arms from one extreme to another. When you confine five of these smarticles inside a small ring, they begin to push on each other expanding and shrinking the group's overall footprint as the arms expanded and contracted. This creates a random motion, that pushes the whole group randomly across a surface. This group of smarticles is called a “supersmarticle.”
"These are very rudimentary robots whose behavior is dominated by mechanics and the laws of physics," said Dan Goldman, a Dunn Family Professor in the School of Physics at the Georgia Institute of Technology. "We are not looking to put sophisticated control, sensing, and computation on them all. As robots become smaller and smaller, we'll have to use mechanics and physics principles to control them because they won't have the level of computation and sensing we would need for conventional control."
Random motion is definitely cool, but controlled motion is the ultimate goal, and during testing, the researchers noticed that when a smarticle would stop working due to low battery power, or if it broke, the supersmarticle as a whole would migrate in the direction of the smarticle that was no longer working. This prompted researchers to add light and sound sensors to each of the smarticles. When a flashlight was pointed at an individual smarticle, it would sense the change in brightness, and stop moving, allowing them to “steer” the supersmarticle in a specific direction.
"If you angle the flashlight just right, you can highlight the robot you want to be inactive, and that causes the ring to lurch toward or away from it, even though no robots are programmed to move toward the light," Goldman said. "That allowed steering of the ensemble in a very rudimentary, stochastic way."
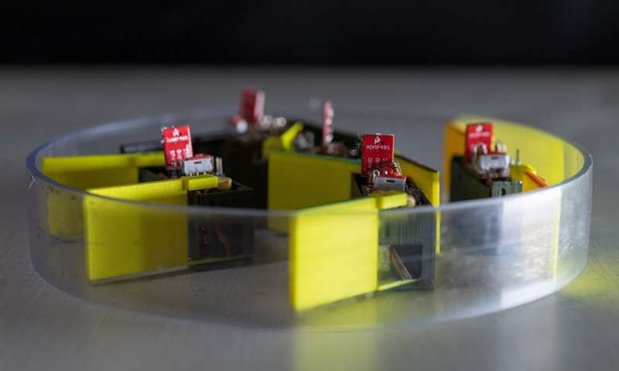
Photo: Georgia Institute of Technology
While using a flashlight to steer the supersmarticle is a great proof of concept, other stimuli such as sound recognition could one day help a swarm of supersmarticles search for survivors of natural disasters. Gas sensors could help direct a swarm of super smarticles to detect and seal pipes or structures that are leaking hazardous materials. It’s quite easy to imagine any number of applications where sensors could be used to direct the motion of the robots to specific stimuli.
"For many robots, we have electrical current move motors that generate forces on parts that collectively move a robot reliably," said Todd Murphey, a professor of mechanical engineering who worked with Northwestern graduate students Thomas Berrueta and Ana Pervan. "We learned that although individual smarticles interact with each other through a chaos of wiggling impacts that are each unpredictable, the whole robot composed of those smarticles moves predictably and in a way that we can exploit in software."
Much like the small magnetic 3D printed robots, I wrote about a few days, ago (https://www.element14.com/community/community/applications/robotics/blog/2019/09/24/3d-printed-magnetic-structures-could-be-the-future-of-micro-biomedical-robotics), these simple 3D printed robots could be the future of robotics, or at least the pioneers of a new era in robotics. I’m quite excited to see what the future holds for these little robots, but even more excited to see what new advancements will come next!
If you would like to read the full research paper, you can find it here.
Source: https://techxplore.com/news/2019-09-shape-shifting-robot-built-smarticles-locomotion.html
-

dubbie
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

dubbie
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children