


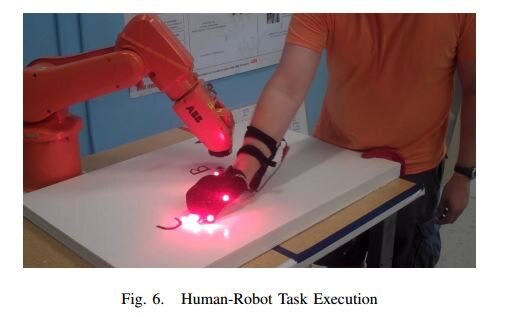
The human teaches the robot tasks to be handled. (via MIT)
Good teamwork is hard to come by - especially when you’re dealing with a group of substantially diverse individuals consisting of both humans and machines. That may soon change. As the sci-fi universe has shown us, man may one-day work alongside robots in a collaborative effort to better the world. In fact, Rethink Robotics recently launched Baxter: a robot that can safely work alongside people in an assembly line environment.
How can we improve cooperation among human and autonomous machine while ensuring that the two avoid bumping heads? Researchers from MIT believe having both man and robot learn together through role-reversal is the way to go.
Stefanos Nikolaidis and Julie Shah have also built a robot of their own named Abbie. The purpose of their research is to effectively demonstrate the benefits of iteratively cross training a human and robot together to learn a shared plan. Abbie works alongside several human counterparts to efficiently complete the task of placing and drilling a screw into a table top.
(via MIT)
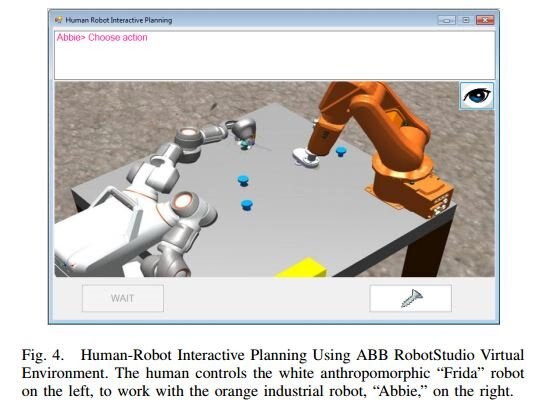
By creating a computational team model of both the human-robot role in the above task and comparing it to a human mental model, the researchers are able to assess the convergence of a human-robot model. They then introduce a planning method that emulates the cross-training strategy. Cross training is a widely used psychological strategy where team members do a role-reversal to adequately learn each other’s roles in preparation of a task. In this experiment, a human subject would place a screw in one of three designated holes on the tabletop. The robot could then either drill the first screw down immediately or wait for their teammate to place all three screws before beginning to drill. First, the researches had the robot wait until all of the screws were placed by a human before beginning to work. Then, when the roles were reversed, the human teammate would either begin to drill immediately after the robot placed the first screw, or stand back and wait. The results were recorded for 36 different human subjects split into two groups: Group A drilled immediately, and Group B stood back.
The findings are rather impressive, displaying work fluidity improvements in several categories. Abbie effectively learned from her human teammates who preferred drilling immediately: rather than continuing to wait, Abbie began to drill as her teammate started to place the next screw on the tabletop. This is seen in the results as a 71% increase in concurrent motion between Group A and the robot - hinting at a building of trust among the teammates. The idle time for humans in Group A was lower than Group B, and Abbie’s idle time was significantly decreased when working with Group A. The distance between members of Group A and Abbie was also measured to be shorter than that of Group B; researchers suggest this to be a positive impact on emotional stresses caused by robot-human interaction.
So, it turns out that role-reversal amongst man and machine does work after all. The team now plans to continue their research focusing on robot anticipation of human movement. If work of this type continues to build momentum, we may be working alongside more Baxters and Abbies in the near future. For that to happen soon, humans too must sustain the synergistic qualities learned from this research.
Cabe
-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children